ActasJA2013 Artic
26
Actas
-
Upload
davidleonardo-galindo -
Category
Documents
-
view
29 -
download
0
Transcript of ActasJA2013 Artic
-
Actas
-
ActasdelasXXXIVJornadasdeAutomtica
Terrassa,4al6deSeptiembrede2013
Organizan:
-
ActasdelasXXXIVJornadasdeAutomticaEditadopor:
RamonSarrateEstruchJosebaQuevedoCasn
ISBN:9788461650637DepsitoLegal:B.173652013
2
-
Presentacin
LasXXXIV JornadasdeAutomtica (JA2013), a realizardel4 al6de Septiembredel2013enelCampusdeTerrassade laUniversitatPolitcnicadeCatalunya (UPC),hansido organizadas por el Departamento de Ingeniera de Sistemas, Automtica eInformticaIndustrial(ESAII)delaUPC.Las Jornadasvienen realizndoseanualmentedesdeelao1977,promovidasporelComit Espaol de Automtica (CEA), y organizadas por distintas universidades ocentrosdeinvestigacin.Aleventosehaninscritoaproximadamente200expertosenestarea,principalmentemiembrosdelComitEspaoldeAutomtica(CEA),queestorganizadoen9grupostemticos: Automtica Marina, Bioingeniera, Control Inteligente, Educacin enAutomtica, Ingeniera de Control, Modelado y Simulacin, Robtica, Sistemas deTiempoRealyVisinporComputador.La conferencia inaugural ser impartida porM LuisaCastaoDirectoraGeneral deInnovacinyCompetitividaddelMinisteriodeEconomayCompetitividad (MINECO).El programa tcnico incluye dos conferencias plenarias (una a cargo de ManfredMorari sobre The role of Theory in Control Practice y la otra a cargo de RamonVilanova sobre El PID en el Tercer Milenio), una resea sobre la historia de laAutomticaporpartedeSebastinDormido,unapresentacinde lasoportunidadesqueofreceUniversiaporpartedeJaumePags,unamesaredondadocentesobrelosMsteresenAutomtica, lasreunionestcnicasde losdiferentesgrupostemticosysesiones de presentacin de comunicaciones expuestas, como es costumbre en lasJornadas,enunespacioconpsteres.Yesteaocomonovedadse llevaracabouninteresante curso sobre robtica asistencial y cuatro presentaciones prcticas deempresasmuy interesantes.Ademssehaprevistoeneldacentralde las JornadasrealizarunentraablereconocimientoalosimpulsoresdelaAutomticaenlaUPC.El programa tcnico viene acompaado, como es habitual, con un interesanteprograma social y cultural, como la visita del Museo Nacional de la Ciencia y laTecnologadeCatalunya (MNATEC) y la copadebienvenidaen la sala JazzCavadeTerrassa as como la visita romnica de Sant Benet del Bages, visita al InstitutogastronmicoAliciaycenadegalaenelrestaurantedeeseentorno.Adems, y como viene siendo habitual en las Jornadas precedentes, el programatcnico y el programa social vienen acompaados de un programa de ocio y deactividadesparaacompaantes.Ysinolvidarquecomoenedicionespasadas,esteaotambinse llevarnacabo losconcursos de robots humanoides y de vehculos cuatrirrotores o drones con unafantstica respuesta de participacin de equipos investigadores nacionales einternacionales.
3
-
Por ltimo, queremos expresar nuestro ms sincero agradecimiento a todas laspersonasyentidadesquehanprestadosucolaboracinaque lapresenteedicindelas Jornadashaya sidoposible.A todos losmiembrosdel comitorganizador,piezaindispensable para el buen funcionamiento del evento, y a todos losmiembros delcomitcientfico.Tambinqueremosagradecera lasempresascolaboradoraspor losdiferentespremiosofrecidosdurantelasXXXIVJornadasdeAutomtica.Osdamos labienvenida a todos losparticipantes yquedamos a vuestradisposicinparagarantizarunaestanciagratayfructferaduranteestosdas.MsinformacinenlaWebdelasJornadasenhttp://ja2013.upc.edu/
Terrassa,20deJuliode2013JosebaQuevedo,TeresaEscobetyVicenPuig
CoresponsablesdelComitOrganizador
4
-
ComitsOrganizadoryCientfico
Comit organizador
Joseba Quevedo Josep M Fuertes
Vicen Puig Pere Caminal
Teresa Escobet Enric Fossas
Fatiha Nejjari Maria Serra
Andreu Quesada Robert Gri
Sebastin Tornil Beatriz F. Giraldo
Josep Contreras Jose Mara Huerta
Rosa Ginesta Cecilio Angulo
Albert Mrquez Pere Ponsa
Albert Masip Ramon Costa
Judit Esteve Diego Garca
Ramon Sarrate Ramon Prez
Quim Blesa Damiano Rotondo
Rita Planas Juan C. Hernndez
Pep Cuguer Carlos Ocampo
Miquel ngel Cuguer Josep Pascual
Ramon Comaslivas
5
-
Comit cientfico
Presidente CEA: Csar de Prada (UVA)
Vicepresidente CEA: Joseba Quevedo Casn (UPC)
Secretario CEA: Miguel ngel Maanas Villanueva (UPC)
Automar: Pere Ridao Rodrguez (UdG)
Bioingeniera: Javier Prez Turiel (UVA)
Control Inteligente: Jos Manuel Andujar Mrquez (UHU)
Educacin en Automtica: Fabio Gmez Estern (US)
Ingeniera de Control: Francesc Xavier Blasco Ferragud (UPV)
Modelado y Simulacin de sistemas dinmicos: Miguel ngel Piera Eroles (UAB)
Robtica: Pedro J Sanz Valero (UJI)
Sistemas de Tiempo Real: Alejandro Alonso Muoz (UPM)
Visin por Computador: Enrique Alegre Gutirrez (UL)
6
-
ComunicacionesAutomar
GRASPER:UnProyectoDirigidoaIncrementarlaAutonomadelaManipulacinSubmarinaP.J.Sanz,J.J.Fernndez,J.Prez,A.Pealver,J.C.Garca,D.Fornas,J.Sales,J.Bernab,R.MarnDISEOMECATRNICODEUNROBOTSUBMARINODEBAJOCOSTEPARAUSODOCENTEManuelGodoy,RamnGonzlez,FranciscoRodrguezSENSORESCIENTFICOSPARAUNVEHCULOAUTNOMOSUBMARINONarvez,F.,Gonzlez,H.,Garca,E.SISTEMADECOMUNICACIONESPARAUNPLANEADORAUTNOMOSUBMARINOGonzlez,H.,Narvez,F.,Garca,E.AutomatizacindevehculomarinonotripuladoensuperficieparaguiadoautnomoCarlosCanoEspinosa,SantiagoT.PuenteMndez,FernandoTorresMedinaRealtimeAUVTerrainBasedNavigationwithOctomapGuillemVallicrosa,AlbertPalomer,DavidRibas,PereRidao
BioingenieraAsistenciadeRobotsColaborativosparaProcedimientosdeSuturavaCirugaMnimamenteInvasivaEnriqueBauzanoNez,MaraBelnEstebanezCampos,IsabelGarcaMorales,VctorFernandoMuozMartnezINCORPORACINDEUNSISTEMADEMINIROBOTSALACIRUGALAPAROSCPICADEINCISINNICAMaraCuevasRodrguez,IreneRivasBlanco,EnriqueBauzano,JessGmezdeGabrielyVctorFernandoMuozCONTROLFUERZAPOSICINDEUNACMARAROBTICAPARATCNICASDECIRUGADEPUERTONICOI.RivasBlanco,E.Bauzano,M.CuevasRodriguez,P.delSazOrozco,V.F.MuozDesarrollodeunSistemaMultimodaldeRehabilitacinasistidaporRobotsR.Morales,F.Badesa,N.GarciaAracil,J.M.Sabater,MiguelAlmonacidAspectosdediseoyevaluacinpreliminardelaplataformarobotizadadeneurorehabilitacinPHYSIOBOTJuanCarlosFraileMarinero,JavierPrezTuriel,CarlosRodrguezGuerrero,RubnAlonsoAlonso,Dra.PaulinaOlivaNavarreteSistemaRobticoPlanarparaNeurorehabilitacin:PrimerosResultadosconpacientesF.Badesa,R.Morales,A.Llinares,N.GarciaAracil,MariaGarciaManzanares,DanielTornero,M.Oliva
7
-
CLASIFICACINDESEALESDEPOTENCIALDEERRORATRAVSDEUNAINTERFAZGRFICACONREALIMENTACINDEFUERZASJoaqunLpez,Andrsbeda,EduardoIez,D.Planelles,JosM.Azorn,JavierGimeno,JosA.Flores,JosM.ClimentMOVIMIENTOBIDIMENSIONALDEUNCURSORMEDIANTEELUSODEARTEFACTOSENSEALESELECTROENCEFALOGRFICASlvaroCosta,EduardoIez,EnriqueHortal,JosM.Azorn,AlbertoRodrguez,DanielTornero,JosA.Bern,JosM.CanoMRSegHerramientainteractivaparagenerarsegmentacionesdereferenciadeimgenesmdicasF.Fumero,S.Garca,O.Nez,J.Sigut,S.AlaynANLISISESPECTRALNOLINEALDELEEGDENIOSCONEPILEPSIAINTRATABLEO.Portols,R.Schroeder,M.Vallverd,A.Voss,P.CaminalEvaluacindemtodosdesegmentacindepropsitogeneralsobreimgenesdefondodeojoOmarNez,FranciscoFumero,JoseSigut,SilviaAlayn.
ControlInteligenteREDESNEURONALESARTIFICIALESENUNREGULADORPIDPARACONTROLAUTOMTICODELRUMBODEUNBUQUEJosLuisCasteleiroRoca,JosLuisCalvoRolle,MatildeSantosCONTROLHIBRIDODIFUSODESLIZANTEPARACONVERTIDORDC/DCTIPOBOOSTMnicaL.VsquezF.,EdwarJacintoG.,FredyH.MartnezS.SocialandSmartSANDSRalFelizAlonso,EduardoZalamaCasanova,JaimeGmezGarcaBermejo,BrunoApolloniDESARROLLODEUNCONTROLADORBORROSOPARAELCONTROLDELAPROFUNDIDADANESTSICAMEDIANTEARDUINOIsraelRiveron,JuanA.Mendez,A.Marrero,AnaLeon,IsabelMartinModeladoborrosodeunaPiladeCombustibleNexaTM1.2kWBallardPowerSystemAntonioJavierBarragnPia,FranciscaSeguraManzano,JosManuelAndjarMrquez,MiguelngelMartnezBohrquezCONTROLDEANESTESIAMEDIANTELGICADIFUSACONDINMICAINVERSAA.MarreroRamos,J.A.MndezPrez,J.A.RebosoMorales,A.M.LenFragoso,I.MartnMateos,E.MorellGonzlezCONTROLAUTNOMODELSEGUIMIENTODETRAYECTORIASDEUNVEHCULOCUATRIRROTORTurOrtega,JosManuel;SantosPeas,MatildeMODELADODEUNVEHICULOAEREONOTRIPULADOMEDIANTEAPLICACINCONJUNTADETECNICASPARAMETRICASYNEURONALESJessEnriqueSierraGarca,MatildeSantosComparacindetcnicasdeoptimizacinmultiobjetivoclsicasyestocsticasparaelajustedecontroladoresPIHelemSabinaSnchez,GilbertoReynozoMeza,RamonVilanova,XavierBlasco
8
-
EducacinenAutomticaUtilizacindelsoftwareAnyLogicenlaenseanzadelControlAutomticoJosMaraGonzlezdeDuranayOscarBarambonesSISTEMASDEDOCUMENTACINYELABORACINDETEXTOSCIENTFICOS:UNAASIGNATURAPARAAPRENDERAPUBLICARENINGENIERAJorgeL.Martnez,AnthonyMandowyAlfonsoGarcaCerezosimLab:LaboratoriodesimulacindelaplantaFestoSilviaAlayn,NorenaMartn,OmarNez,FranciscoFumeroSimuladores3DyevaluacinautomticaparaprcticasdeAutomatizacinIndustrialAdolfoJ.SnchezdelPozo,DavidMuozdelaPea,FabioGmezEsternHERRAMIENTASDEHARDWAREYSOFTWARELIBREPARALAIDENTIFICACINEXPERIMENTAL,ELDISEOYLAIMPLEMENTACINDECONTROLADORESPIDRobertoSanchisLlopis,SilviaEstupiaArioLaboratorioVirtualyRemotoderobotsparalelosArturoGil,AdrinPeidr,JosMaraMarn,scarReinoso,DavidValiente,LuisMiguelJimnez, Miguel JuliBenchmarkdeControlySupervisindeRedesdeDistribucindeAguaGerardSanz,RamonPrezAprendizajecolaborativoeinterinstitucionalenentornosvirtualesAntonioJavierBarragnPia,JosManuelAndjarMrquez,YolandaCeadaGarrido,EloyIrigoyenGordo,FernandoArtazaFano,VicenteGmezGarayHERRAMIENTADESIMULACINDELCOMPORTAMIENTODEUNBIORREACTORDISCONTINUOAdrinCasimirolvarez,JavierdePedroLpez,AntonioCocaRiega,DiegoGarcaOrdsPLATAFORMAROBTICADEBAJOCOSTEYRECURSOSLIMITADOSBASADAENARDUINOYDISPOSITIVOSMVILESA.Soriano,L.Marn,R.Juan,J.Cazalilla,A.Valera,M.Valls,P.AlbertosDesarrollodeplantasindustrialesvirtualesparaelaprendizajedelaautomatizacinRodrguezDaz,Francisco;Morenobeda,JosCarlos;Pawlowski,Andrzej;SnchezMolina,JorgeAntonio;Lpez,AntonioHerramientabasadaenSCORMparalaintegracinautomticadeLaboratoriosOnlineenLMSIldefonsoRuanoRuano,JuanGmezOrtega,JavierGmezGarca,ElisabetEstvezEstvezDESARROLLODEUNEQUIPODIDACTICOPARALASMATERIASDECONTROLDEPROCESOSDELOSGRADOSDEINGENIERIADELARAMAINDUSTRIALYDESISTEMASTICTeresaEscobetCanal,AntonioEscobetCanal,JuanMartnezDomenceAPLICACINDECONTROLCONLABVIEWPARAELSIEMENSS71200,ENREDLOCALOINTERNETEduardoJ.MoyadelaTorre,FranciscoJ.GarcaRuz,IsraelSurribasPlanasSISTEMASDECONTROLPORCOMPUTADORUNIFICACINDECRITERIOSJosLuisCasteleiroRoca,JosLuisCalvoRolle,RamnFerreiroGarca
9
-
IngenieradeControlControlMultivariableQFTparalaDinmicaLongitudinaldeunVehculoAreoJavierJoglarAlcubillaJoaqunArandaAlmansaControldeVelocidadmediantePasodePalaparaunAerogeneradorExperimentaldePequeaPotenciaSergioFragosoHerrera,FranciscoVzquezSerrano,FernandoMorillaGarcaControlMultivariableDescentralizadoparaunAerogeneradorExperimentaldePequeaPotenciaSergioFragosoHerrera,FranciscoVzquezSerrano,FernandoMorillaGarcaModeladoycontroldeunvehculoelctricomedianteunaestrategiadecontrolpredictivobasadoenmodeloAgustnPrezCastro,JulioEliasNormeyRico,JosLuisGuzmnSnchez,ManuelBerenguelSoriaEstrategiaparalacorreccindemodelosnolinealesvarianteseneltiempomedianteestimacindeparmetros:AplicacinalcontrolpredictivoyaladiagnosisdesistemasAgustnPrezCastro,JosSnchezMoreno,JosLuisGuzmnSnchezSistemaexpertoparaladeterminacindereferenciasenelprocesodeelaboracindeaceitedeolivavirgenP.CanoMarchal,D.MartnezGila,J.GmezGarca,J.GmezOrtegaDISEODELOSCONTROLADORESDELOSSISTEMASDEVACOYTEMPERATURADEUNREACTORAGITADOFerranBabotBranzuela,RamonCostaCastellLAADMINISTRACINDERECURSOSAPLICADAALMANTENIMIENTODEDISPOSITIVOSDECAMPORamnFerreiroGarca,JosLuisCalvoRolle,JosLuisCasteleiroRoca,ManuelRomeroGmezEstimacinGarantistadelaPosicindeunQuadrotorconGPSRamnA.Garca,ManuelG.Ortega,FranciscoR.RubioyGuilhermeV.RaffoDISEODECONTROLADORESPORADELANTOPARAINVERSINDERETARDONOREALIZABLEC.Rodrguez,J.L.Guzmn,M.Berenguel,T.Hgglund,J.E.NormeyRicoRestriccionesenelValordelosEnlacesdeComunicacinenunSistemadeControlCoalicionalFranciscoJavierMurosPonce,JoseMaraMaestreTorreblanca,EncarnacinAlgabaDurn,EduardoFernndezCamachoADMINISTRACINDERECURSOSREFORZADAMEDIANTESUPERVISINDEELEMENTOSFINALESDECONTROLRamnFerreiroGarca,JosLuisCalvoRolle,JosLuisCasteleiroRoca,ManuelRomeroGmez,AlbertoDemiguelCatoriaControlNoLinealIterativodeModelosdeManiobradeVehculosMarinosElasRevestido,M.TomsRodrguez(b),FranciscoJ.Velasco
10
-
AROBUSTGRIDSIDECONVERTERCONTROLFORWINDTURBINESYSTEMBASEDONDOUBLEFEEDINDUCTIONGENERATOROscarBarambones,JosMaraGonzlezdeDuranaandPatxiAlkortaPlataformaparamonitorizacinycontroldistribuidosbasadaen802.15.4ConradoArquer,LuisOrihuela,FranciscoR.RubioDETECCIONDEFALLOSCONVALIDACIONPROBABILISTICAJoaquimBlesa,AmaliaLuque,TeodoroAlamo,FabrizioDabbeneCONTROLDEACTITUDDEUNCOHETEDESONDEOATMOSFERICOPauManent,JosebaQuevedo,BernardoMorcegoDesarrollodeunaherramientaparaelanlisisdedatosmulticriterio.AplicacinenelajustedecontroladoresdeltipoPID.AlbertoPajaresFerrando,FrancescXavierBlascoFerragud,GilbertoReynosoMeza,JuanManuelHerreroDuraCONTROLDEPOSICINYORIENTACINDEUNAPLATAFORMAOMNIDIRECCIONALNOHOLONOMAPabloBengoaGanado,JosuLarraagaLeturia,EloyIrigoyenValidacinexperimentaldeestrategiasdereduccindelconsumodesensoresinalmbricosensistemasdecontrolenred.IgnacioPearrocha,AdrianDinu,RobertoSanchisSISTEMADEDETECCINDEFALLOSBASADOENTCNICASDEERRORACOTADOYUMBRALDINMICOJosManuelBravoCaroDiseoptimoMultiobjetivodePIDsparaelControldeTemperaturaenCavidadesMicroondasS.GarciaNieto,G.ReynosoMeza,F.PearandaFoix,A.BorrellDiseoeimplementacinenUAVsdeunsistemadecontroldeformacindevuelobasadoenSMRCIgnacioRibelles,AlejandroVignoni,SergioGarcaNieto,JessPicOBSERVATIONOFTHEINTERNALSTATESOFAPEMFCANODEGASCHANNELJ.Luna,C.Batlle,C.Kunusch,J.Riera,M.L.SarmientoCarnevali,M.Serra
ModeladoySimulacindeSistemasDinmicosModeloparalageneracindedatosdeconsumoenergticoresidencialbasadoenunenfoqueprobabilsticoJ.K.Gruber,M.ProdanovicPROGRAMACINDECONTROLADORPREDICTIVOENECOSIMPROEIMPLEMENTACINENPLANTADEDISTRIBUCINDEOXGENOJuanDavidTejerina,RubnMart,DanielNavia,CsardePradaPREDICTORNOPARAMTRICOBASADOENTCNICASDEERRORACOTADOJosManuelBravoCaroModelosimplificadoyorientadoalcontroldesistemasderefrigeracinGuillermoBejarano,ManuelG.Ortega,FranciscoR.Rubio,FernandoMorilla
11
-
EstudiodelainteraccindelfuselajeyelmovimientodealeteodelaspalasdelrotorprincipalenunhelicpteroSalvadorCastilloRivera,MaraTomsRodrguez,G.NicolsMarichalPlasencia,ngelaHernndezLpezTENSIONESINDUCIDASENCABLESDEALTATENSINMiguelAngelCalafatTorres,MatildeSantosPeasSIMULACINYCONTROLDECOMPRESORESCENTRFUGOSUSANDOECOSIMPROTaniaRodrguezBlanco,DanielSarabiaOrtiz,CsardePradaMoraga,JosLuisMoralesCONCURRENTANDDISTRIBUTEDSYSTEMSANALYSISUSINGCOLOREDPETRINETSJenaroNosedalSnchez,OlatundeBaruwa,MiquelngelPieraErolesDESARROLLOYVALIDACINEXPERIMENTALDEUNMODELODINMICOPARAUNVEHCULOELCTRICOCONMOTORESENLASRUEDASDavidMarcos,CarlosBordons,JohanWideberg,DanielA.Mntaras,PabloLuque.MODELONARMAXDEPHENUNFOTOBIORREACTORTUBULARDEMICROALGASI.Fernndez,G.A.Andrade,J.L.Guzmn,M.Berenguel,D.J.PaganoIdentificacindeunmodelopasivoparalagraInteco3DCraneeimplementacinenEJSPabloFalcn,AntonioBarreiro,MiguelD.Cacho,EmmaDelgadoIntercambiodeModelosentreHerramientasdeSimulacinconFunctionalMockupInterface(FMI)JavierBonilla,JosDomingolvarez,LidiaRoca,AlbertodelaCalle,LuisJosYebra,FranciscoRodrguezModeladodelreactorqumicodelprocesoBTOmedianteredesneuronalesartificialesGorkaSorrosal,EloyIrigoyen,CruzE.Borges,AinhoaAlonsoANLISISDELPROBLEMADEEXPLOSINDEESTADOSENSISTEMSDICRETOSBASADOENELCUBORUBIKEmilioJimenezMacias,FranciscoJavierLeivaLazaro,JuanIgnacioLatorreBiel,MercedesPerezdelaParteMODELADODEUNPROCESODEEXTRUSINENALIMENTACINEduardoJ.MoyadelaTorre,F.JavierAntolnJimnez,AlfonsoPoncelaMndez,OscarF.CalvoMartnezReduccindemodelosenBiologaSinttica:Modeladoysimulacinderuidoyvariabilidadenexpresingentica.YadiraBoada,AlejandroVignoni,JessPic
RobticaDesarrollodeunaclaseenMatlabparalasimulacinrealistaderobotsserialesR.Morales,A.Sanchez,F.Badesa,N.GarciaAracil,C.Perez,J.M.SabaterGEOMETRICHYBRIDPATHPLANNINGFROMTHEARTIFICIALPOTENTIALFIELDMETHODCristianC.Rincn,EdwarJacintoG.yFredyH.MartnezS.
12
-
DISEOYDESARROLLODEROBOTMVILPARATRANSPORTEYDISPENSACINDEMEDICAMENTOSRobertoPinillos,SalvadorDomnguez,EduardoZalama,JaimeGmezGarcaBermejo,ngeldeMiguelNavaresManipulacindeObjetoscondosDedosUsandoInformacinTctilAndrsMontao,RalSurezBsquedadeprensionesconforceclosuredeobjetos2Darticuladoscon2eslabonesNoAlvaradoTovar,RalSurezSOLUCINALPROBLEMADESLAMEMPLEANDOSGDCONIMGENESOMNIDIRECCIONALESDavidValiente,ArturoGil,MiguelJuli,LorenzoFernndez,scarReinosoCONTROLVISUALEMBEBIDOPARAELPOSICIONAMIENTOAUTNOMODEUNHEXACPTEROJavierPrez,JorgePomares,GabrielJ.Garca, F. TorresLOCALIZACINASISTIDAPORGPSPARAROBOTSMVILESENCONFIGURACINACKERMANNDERECURSOSLIMITADOSLeonardoMarn,ngelSoriano,VicentMayans,MarinaValls,ngelValera,PedroAlbertosIMPLEMENTACINDECONTROLADORESFUERZAYPOSICINPARAUNMANIPULADORPARALELODE3DOFJoseI.Cazalilla,MiguelCorbern,M.DazRodrguez,ngelValera,VicenteMata,MarinaVallsFusinsensorialdevisin,fuerzayaceleracinparaelcontrolderobotsmanipuladoresconmovimientosrestringidos.AlejandroSnchezGarca,JavierGmezGarca,JuanGmezOrtegaMejoradelasCapacidadesdeunRobotMiniHumanoideenlaTareadeSubiryBajarEscalerasWilmerCardenasPilatua,FlixRodrguezCaadillas,AlbertoJardnHueteControldeposicin/fuerzadeunrobotantropomrficobasadoencontrolpredictivoJ.delaCasaCrdenas,J.GmezGarca,J.GmezOrtegaHaciaunaarquitecturadeexploracinmultirobotdistribuidaparaentornosnocontroladosMiguelJuli,OscarReinoso,LuisPay,FranciscoAmors,DavidbedaDISEODEUNDISPOSITIVOHPTICODEBAJARESOLUCINBASADOENSMAPARAAPLICACINENTELEROBTICAFranciscoJavierTormo,JaimeMasi,JuanRamnRufino,JosFerri,BorjaMansillaClculoautomticodesecuenciasdeensambladobasadoenunatcnicadeagrupacinparalaconstruccindeestructurasmedianteequiposderobotslvaroSempere,IvanMazayAnbalOllero
13
-
SistemasdeTiempoRealESTUDIODEFIABILIDADDEUNAPLATAFORMADECOMUNICACINBASADAENELESTNDAR802.11FranciscoCrdenasCapitn,JosM.FornsRumbao,FranciscoRodrguezRubio,RafaelEstepaAlonsoLarectadeChevysevenlaaproximacinautomticaacrticodelosreactoresnuclearesJ.L.FernndezMarrn,JuanBlzquezMartnez,JosMiguelBarcalaRiveiraMONITORIZACINYCONTROLREMOTODECONSUMOENERGTICOMEDIANTECOMUNICACINWIFIIsidreOrtegaGmez,SergioZarzaSnchez,JosAntonioLzaroVilla,RosaM.FernndezCantPlataformadegestindeaplicacionesdistribuidasdeseguridadfuncionalcontoleranciaafallosAitorAgirre,RafaelPriego,DarioOrive,ElisabetEstvez,JonPrez,MargaMarcosDiseoBasadoenComponentesygeneracindeaplicacionesrobticasmanipuladorasbajoelmiddlewaredeOROCOSA.SnchezGarca,E.Estvez,JGmezOrtega,J.GmezGarcaEVENTDRIVENMIDDLEWAREFORDISTRIBUTEDSYSTEMCONTROLManuelMuoz,EduardoMunera,J.FranciscoBlanes,JoseE.Simo,GinesBenetHerramientabasadaenMDEparasistemasorientadosaserviciodinmicamentereconfigurablesAintzaneArmentia,MargaMarcos,ElisabetEstvez,FranciscoGmezMolineroReconfigurandoaplicacionesdeautomatizacinindustrialconFTTMAMikelGonzlez,AdrinNoguero,FedericoPrez,IsidroCalvoImplementacindeunsistemaHardwareIntheLoopparalasimulacinentiemporealdepilotosautomticosparaUAVsJ.Velasco,S.GarcaNieto,G.ReynosoMeza,J.SanchisArquitecturadetiemporealparaelcontroldeactitudenunsatliteexperimentalJuanZamorano,ngelEsquinas,PeterBradley,DanielBrosnan,JorgeGarrido,EmilioSalazar,AlejandroAlonsoyJuanA.delaPuente
VisinporComputadorEVALUATIONOFSHAPEANDCOLORDESCRIPTORSBYUSINGBAGOFWORDTECHNIQUESWITHONEVSALLCLASSIFICATIONFidalgoE.,FernndezRoblesL.,GarcaOrdsM.,GarcaOlallaO.,AlegreE.ComparisonofdifferentLocalBinaryPatternvariantsformaterialrecognitionusingKTHTIPS2adatasetOscarGarcaOlalla,MaraTeresaGarcaOrds,LauraFernndezRobles,DiegoGarcaOrds,EnriqueAlegreRotationInvariantContourPointsDescriptorHistogramforshapebasedimageretrievalMaraTeresaGarcaOrds,OscarGarcaOlalla,LauraFernndezRobles,DiegoGarcaOrds,EnriqueAlegre
14
-
ROBUSTNESSTOROTATIONINPERCEPTUALHASHINGMETHODSVIADOMINANTORIENTATIONDiegoGarcaOrds,EnriqueAlegre,MaraTeresaGarcaOrds,OscarGarcaOlalla,LauraFernndezCOMBININGSURFWITHGLOBALTEXTUREDESCRIPTORSFORCLASSIFYINGBOARSPERMFernndezRobles,Laura;Alegre,Enrique;GarcaOrds,MaraTeresa;GarcaOlalla,Oscar;GarcaOrds,Diego;FidalgoFernndez,EduardoDeteccinyestimacindelaorientacindelrostrodelconductorbasadaenmodelos3DGustavoPelez,FernandoGarca,JosMaraArmingol,ArturodelaEscaleraDeterminacindelestadodebatidodelapastadeaceitunaempleandovisinporcomputadorDiegoManuelMartnezGila,PabloCanoMarchal,JavierGmezGarca,JuanGmezOrtegaConstruccindemapastopolgicosyestimacindetrayectoriasusandodescriptoresdeaparienciavisualglobalFranciscoAmors,LuisPay,LorenzoFernndez,scarReinoso,MnicaBallesta,MiguelJuliOBJECTRETRIEVALUNDERDIFFERENTILLUMINATIONDIRECTIONSUSINGINVARIANTLOCALFEATURESGorgojo,Nuria;FernndezRobles,Laura;Alegre,EnriqueSeguimientodeobjetossinmarcasfiducialesconcmarasToFS.SatorresMartnez,J.GmezOrtega,J.GmezGarca,A.SnchezGarca,J.delaCasaCrdenasSISTEMADEALERTAYREGISTRODEINFRACCIONESDETRFICONourdineAliane,JavierFernandezySergioBemposta.AnlisisdeldescriptorVFHparaelreconocimiento3DdemltiplesvistasdeobjetosdomsticosFranciscoMartnez,CarlosM.Mateo,PabloGil,FernandoTorresControlvisuoinercialde6gradosdelibertadparaelposicionamientoareodeunacmaraJessGonzlezVillagmez,ManuelVargasVillanueva,FranciscoRodrguezRubio
15
-
Herramienta basada en SCORM para la integracin automtica de Laboratorios Online en LMS
Ildefonso Ruano Ruano, Juan Gmez Ortega, Javier Gmez Garca, Elisabet Estvez Estvez Grupo de Robtica, Automtica y Visin por Computador, Universidad de Jan, Jan, Espaa
{alonso, juango, jggarcia, eestevez}@ujaen.es
Resumen Los laboratorios online se utilizan como valiosos recursos de apoyo a la docencia desde hace bastantes aos. Como recursos docentes con gran potencial podran enmarcarse dentro de lo que se denomina recurso de e-learning. Una de las ltimas tendencias en el desarrollo de estos laboratorios ha sido su integracin en los llamados Sistemas de Gestin de Aprendizaje (LMS). En este trabajo se presentan una propuesta basada en el conjunto de normas SCORM- Sharable Content Object Reference Model, estndar de facto de contenidos e-learning que facilita a los desarrolladores Java de laboratorios online la integracin con los LMS. Para ello se muestra un ejemplo de laboratorio virtual creado con Easy Java Simulations (EJS) en el que se utiliza esta metodologa logrando una integracin entre el software del laboratorio virtual y el LMS a travs de SCORM. Palabras Clave: SCORM, Sistemas de Gestin de Aprendizaje, Laboratorios Online. 1 INTRODUCCIN El trabajo de laboratorio es indispensable e indiscutible en la educacin universitaria de la mayora de asignaturas directamente relacionadas con la ingeniera [6]. Los laboratorios remotos, o virtuales, presentan mltiples y variadas ventajas. Entre stas se puede destacar el ahorro de costes, extender el uso de recursos escasos, compartir equipamiento con otros organismos, seguridad de las personas y ampliar la disponibilidad de recursos en el tiempo y el espacio. Los laboratorios virtuales/remotos pueden entenderse como una forma de e-learning. Los primeros prototipos de laboratorios remotos para educacin fueron realizados a medida con protocolos y servidores tambin a medida [3], pronto se vi la posibilidad de utilizar la web para dar soporte a los experimentos y surgieron sistemas propios para el desarrollo de laboratorios [9]. Estos sistemas estaban soportados por portales y arquitecturas especficas
[4] [8]. El e-learning ha evolucionado desarrollando una serie de herramientas y estndares que facilitan la interoperabilidad de contenidos. A su vez, dentro del e-learning los Sistemas de Gestin de Aprendizaje (LMS, Learning Management System) constituyen una herramienta bsica comn a los alumnos, contienen la mayora, sino todos los contenidos y herramientas docentes, por eso la evolucin lgica de la forma de implementar los laboratorios virtuales y remotos hizo que se tratarn de integrar en los LMS, hecho que se ha realizado en algunas ocasiones de forma bsica [13]. Se ha generalizado el uso de LMS como la herramienta bsica integradora de recursos de e-learning y SCORM (Sharable Content Object Reference Model) como el conjunto de normas y especificaciones de e-learning que permiten el intercambio de contenidos entre LMS, la ltima versin de SCORM es la cuarta edicin de SCORM 2004, lanzada en 2009 [1]. SCORM fue creado para que los desarrolladores pudieran generar contenido reusable e interoperable entre mltiples LMSs. Proporciona las pautas para lanzar y manejar contenidos, un mecanismo comn para que los contenidos se comuniquen con el LMS y un lenguaje/vocabulario predefinido que forma la base de esa comunicacin. La integracin de laboratorios online y LMS ofrece bastantes ventajas tanto para los desarrolladores de los mismos como para el alumnado. Entre ellas destacan principalmente la posibilidad de que el LMS realice el control de acceso de los usuarios y que se presenten todos los recursos docentes en un mismo entorno. Las primeras aproximaciones de los laboratorios a los LMSs trataban de usar los modelos de laboratorios ya desarrollados, empleando tecnologas y modelos ya experimentados. Sin embargo, de esta forma se deja de lado al estndar de facto de contenidos e-learning, SCORM, para realizar la integracin se desarrollan mdulos especficos y extensiones del LMS que atienden a las caractersticas particulares del laboratorio en cuestin [7]. De este modo, se pueden conseguir resultados muy prometedores y potentes [14] aunque difcilmente reutilizables ya que no
XXXIV Jornadas de Automtica. Terrassa, 4 al 6 de Septiembre de 2013
275
-
permiten su uso en laboratorios desarrollados con otras tecnologas ni en un LMS distinto al que se utiliz en principio. Recientemente se ha desarrollado un sistema que permite que los modelos de laboratorios se integren en los LMS utilizando SCORM. Para ello, se ofrece un portal que acta como repositorio de laboratorios que se crean mediante la incrustacin del software del laboratorio en un formato SCORM [10]. Esta forma de trabajar hace que no existan requerimientos para la tecnologa de desarrollo del laboratorio; cualquier tecnologa sera vlida. Sin embargo, este sistema exige una complicacin en las comunicaciones realizadas a la hora de realizar un experimento (en el caso de laboratorios remotos se ven envueltos el sistema servidor remoto de la planta real, el portal especfico, el LMS y el PC del usuario que realiza el experimento) y, sobre todo, no ofrece posibilidades de interaccin avanzadas entre el software del laboratorio y el LMS. De este modo no se aprovechan las posibilidades de comunicacin laboratorio-LMS que se podran obtener. En este trabajo se presenta una herramienta para que los desarrolladores de laboratorios virtuales/remotos consigan que su software interacte de forma completa con un LMS con todas las posibilidades que ofrece SCORM. Para ello se debe utilizar una implementacin del interfaz para la tecnologa utilizada en el desarrollo del laboratorio, en este caso Java. El trabajo mostrado en esta comunicacin realiza un encapsulado de las funciones que ofrece el LMS a los contenidos SCORM (mediante una instancia del Aplication Program Interface, API) que permiten la manipulacin del modelo de datos del Run-Time Environment (RTE) de SCORM [1]. Despus ser necesario que el software de laboratorio, una vez desarrollado incorporando esta herramienta, se incluya como Applet en un formato SCORM. De este modo, las particularidades de las comunicaciones SCORM-LMS son transparentes a los desarrolladores. A modo de ejemplo se ha desarrollado un laboratorio virtual con la herramienta Easy Java Simulation, EJS [5], que utiliza el lenguaje de programacin Java para comunicarse con el LMS. Este ejemplo se genera desde EJS como un Applet Java que se incluye dentro de un paquete SCORM que puede importarse como contenido SCORM en un LMS compatible [2]. El laboratorio virtual se ha diseado para asignaturas de grados de la rama de Ingeniera Industrial en las que se est utilizando en mdulos de identificacin y caracterizacin de sistemas dinmicos. El resto del artculo est estructurado de la siguiente forma: en el apartado 2 se explican las caractersticas principales de los estndares SCORM y sus 3
componentes, haciendo un mayor hincapi en el RTE y su principio de funcionamiento bsico. En el apartado 3 se describe la integracin de los laboratorios con los LMS mediante SCORM. En el apartado 4 se muestra un ejemplo de laboratorio virtual desarrollado en EJS e integrado en un mdulo SCORM que interacta con ILIAS, el LMS utilizado como plataforma de docencia virtual en la Universidad de Jan (UJA), mediante las funciones descritas en el apartado 3. Para finalizar el apartado 5 muestra las conclusiones del trabajo y marca las lneas futuras del mismo. 2 SCORM COMO SOPORTE DE
LABORATORIOS ONLINE Los estndares y especificaciones SCORM constituyen el estndar de facto de docencia virtual. El conjunto de productos que soportan SCORM incluye la mayora de los LMS del mercado [2]. estn documentados y mantenidos por el Advanced Distributed Learning Iniciative (ADL) de los Estados Unidos de Amrica, aunque derivan de diversos trabajos realizados por varias organizaciones tecnolgicas y de la industria entre las que se encuentra el IMS Global Learning Consortium (IMC), el Aviation Industry CBT Commitee (AICC) y el Electrical and Electronics Engineers Learning Technology Standards Commitee (IEEE LTSC). Existen varias versiones de SCORM (1.0, 1.2, y 2004), utilizando la ltima de ellas: la edicin 4 de SCORM 2004. SCORM ofrece un marco que se aplica a los contenidos de e-learning en un LMS con el fin de definir su encapsulado, lanzamiento e intercambio de datos. Para ello se definen 3 subespecificaciones: Seccin de empaquetado de contenidos
(Content Packaging) [1]. Especifica la forma de describir y empaquetar los contenidos. Est basado en XML (eXtensible Markup Language) principalmente.
Seccin de secuenciacin (Sequencing) [1]. Especifica la forma en la que el usuario puede navegar entre las distintas partes del contenido SCORM (SCOs o Sharable Content Object). Se define como un conjunto de reglas y atributos en formato XML.
Seccin de tiempo de ejecucin (RTE) [1]. Especifica la forma en que debe lanzarse el contenido y como se realiza la comunicacin con el LMS. Basado en ECMAScript (JavaScript) principalmente.
Para realizar este trabajo se han utilizado las tres especificaciones, aunque el principal objetivo del mismo hace que la subespecificacin RTE sea la que se ha tratado de forma ms intensa. El RTE requiere unas condiciones para que los objetos de contenido
XXXIV Jornadas de Automtica. Terrassa, 4 al 6 de Septiembre de 2013
276
-
SCORM puedan lanzarse y gestionar la informacin del progreso del alumno que puede intercambiarse con el LMS. En el contexto SCORM existen dos tipos de objetos de contenido: SCOs y Assets. Los Assets no tienen capacidad de comunicarse con un LMS, SCORM slo requiere que un LMS lance los Assets a los alumnos mediante el protocolo HTTP. Un SCO es la unidad de informacin lgica ms pequea que un LMS puede entregar a los alumnos desde la propia plataforma y que puede comunicarse con el LMS. Tambin se puede definir un SCO como el nico componente de SCORM que usa el API de SCORM, que es el mecanismo de comunicacin que existe para obtener y almacenar datos entre el LMS y el SCO (p.e. puntuacin alcanzada, lmites de tiempo, objetivos, etc.) y para informar sobre el estado de comunicacin conceptual entre el SCO y el LMS (p.e. inicializado, terminado y/o condiciones de error). La informacin que se pueden intercambiar un SCO y un LMS viene definida por el modelo de datos preestablecido y estandarizado. Este modelo de datos se usa para definir elementos del modelo de datos que el SCO y el LMS deben conocer y deben ser mantenidos por el LMS de la misma forma independientemente del LMS utilizado. Cuando un LMS lanza un SCORM debe hacerlo en una ventana de navegador web dependiente de la ventana del LMS que exponga la instancia del API como un objeto del Modelo de Objetos del Documento (DOM). La instancia del API la debe proporcionar el LMS. Un LMS slo puede lanzar y registrar un SCO a la vez (por alumno). El SCO debe buscar recursivamente en la jerarqua de ventanas padre hasta encontrar la instancia del API para, una vez conseguido, pueda iniciar una sesin de comunicacin con el LMS. La figura 1 ayuda a entender el modelo temporal del RTE de SCORM.
Figura 1. Modelo temporal del RTE.
En la figura 1 se muestra el significado temporal de una sesin de login en el LMS, de un intento del alumno, de una sesin de alumno y de una sesin de comunicacin del SCO con el LMS. Tambin se muestran las funciones del API que pueden ejecutarse dependiendo del estado en el que se encuentre el SCO. El API de SCORM consiste bsicamente en la definicin de slo 8 funciones que pueden ser utilizadas por un SCO. Estas funciones se pueden estructurar en 3 categoras: Funciones de sesin (Initialize() y Terminate()).
Se usan para establecer el inicio y el final de una sesin de comunicacin.
Funciones de transferencia de datos (GetValue(), SetValue() y Commit()). Se usan para intercambiar datos del modelo RTE de SCORM entre el LMS y el SCO.
Funciones de soporte (GestLastError(), GetErrorString() y GetDiagnostic()). Se usan para comunicaciones de soporte entre el SCO y el LMS.
Una vez que un LMS lanza un SCO puede iniciar una sesin de comunicacin con el LMS para almacenar y obtener informacin del modelo de datos del RTE. Esto lo logra realizando llamadas a las funciones JavaScript que contiene la instancia del SCORM API que facilita el LMS en el que est ubicado el SCO. Aunque el proceso pueda parecer sencillo al existir slo 8 funciones se puede complicar bastante ya que el modelo de datos RTE de SCORM tiene un nmero bastante significativo de datos y subconjunto de elementos en muchos de ellos. 3 DESCRIPCIN DE LA DE
INTEGRACIN LAB-LMS CON SCORM
El objetivo de este trabajo es facilitar la integracin de los laboratorios online, ya sea virtual o remoto, con los LMS. Para ello se ha tratado de buscar una solucin que sea lo ms universal y extrapolable posible, por eso se trat de utilizar los estndares SCORM como soporte del SW soporte de los laboratorios. Las preguntas que hay que responder ahora son cmo incluir un laboratorio online en un SCORM?, cmo lograr la comunicacin entre el laboratorio y el LMS? La respuesta a la primera pregunta es sencilla, SCORM es un formato abierto que se ofrece en forma de pgina HTML, esto hace que sea totalmente compatible con la mayor parte de los laboratorios
XXXIV Jornadas de Automtica. Terrassa, 4 al 6 de Septiembre de 2013
277
-
remotos/virtuales, los cuales se suelen mostrar a los alumnos empotrados en pginas web. Este hecho ha sido realizado con xito en otros trabajos [10], ofreciendo la posibilidad de acceder a un repositorio de laboratorios virtuales y remotos que son incluidos en formato SCORM, sin embargo la respuesta a la segunda pregunta requiere que se produzcan cambios en el software del laboratorio con el fin de acceder a las funciones Javascript del API de SCORM en el que se envuelve el laboratorio. Esto se puede lograr, facilitando adems su uso, desarrollando una herramienta que consiste en un conjunto de funciones nativas a la tecnologa de desarrollo del laboratorio que oculten el problema de acceso al modelo de datos del RTE de SCORM. De este modo los desarrolladores de laboratorios virtuales podrn usar estas funciones para integrarlos de forma sencilla con el LMS sin tener que conocer al detalle las caractersticas del RTE de SCORM. Se ha utilizado Java, que es uno de los lenguajes ms utilizados en el desarrollo de laboratorios online por tener caractersticas muy recomendadas entre las que destacan su amplio uso a nivel mundial, facilidad de manejo, estar generado bajo licencia libre y la posibilidad de generar el SW de laboratorio en formato Applet de Java. Tambin se ha usado el paquete netscape.Javascript.* para poder acceder al modelo de objetos del documento (Document Object Model, DOM) de la pgina en la que se incluye el Applet del laboratorio y poder llamar a las funciones Javascript del API de SCORM tal y como recomienda Oracle (la empresa responsable de Java) [11]. La mayora de las funciones desarrolladas estn relacionadas con la transferencia de datos Lab-LMS, estas funciones permiten acceder (y modificar en los casos en los que est permitido) al valor de los datos del modelo de datos del RTE que mantiene el LMS. Estas funciones se pueden agrupar en dos tipos: Funciones que permiten obtener valores del
modelo de datos de RTE e incorporarlos al SW del laboratorio. A modo de ejemplo, los datos del modelo que se han consultados con estas funciones en el ejemplo descrito en apartados posteriores han sido: el nombre del alumno que el LMS mantiene en su base de datos, la versin del API y el estado de ejecucin del SCO en el que se ubica el Applet del laboratorio con el fin de mostrarlos en una ventana del Applet. Para cada una de estas consultas se ha creado una funcin especfica con el fin de facilitar su uso a los desarrolladores de laboratorios y que no tengan obligacin de conocer los detalles del modelo ni de las comunicaciones que se realizan.
Funciones que modifican algn valor del modelo de datos, y/o crean elementos cuando
esto es posible, en funcin del trabajo realizado en la manipulacin del SW de laboratorio. Merece especial mencin el conjunto de datos asociados a los comentarios; Desde el laboratorio online (Applet de Java) se pueden crear nuevos comentarios para ser almacenados en el LMS que pueden incluir cadenas de datos escritos por el alumno o generados automticamente por el software del laboratorio indicando adems el momento (fecha y hora) y la localizacin en que se realizaron.
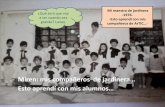
La figura 2 contiene un ejemplo de diagrama UML (Unified Modified Language) que muestra las entidades y los mtodos necesarios para que se establezca la integracin de un laboratorio virtual con un LMS por medio de recursos SCORM. Para ello el alumno (learner) debe introducir su nombre de usuario y contrasea para entrar en el LMS (login LMS). Despus, mediante la navegacin por los recursos y estructura del LMS, debe acceder al mdulo SCORM y abrirlo, en ese momento comenzar lo que se llama un intento SCORM (SCORM attempt), el SCORM puede tener una estructura variada en funcin del diseo que se la haya dado, en el momento en el que entra en un SCO se entra en lo que se llama una sesin de aprendizaje (learner sesin) y se dispone de una instancia de la API que proporciona el LMS para acceder a las funciones del RTE, normalmente se suele acceder a la API mediante un software intermedio (APIWrapper) que facilita su uso. En este momento ya se pueden utilizar algunas de las funciones que permiten interactuar el SCO con el LMS, entre ellas est la funcin Initialize(), que marca el inicio de lo que se conoce como una sesin de comunicacin RTE (communication sesin). Tambin al iniciar una sesin de comunicacin ya se pueden intercambiar datos entre el modelo de datos RTE que mantiene el LMS y el SCO o cualquier recurso que ste contenga, como es el caso de los Applet Java que constituyen laboratorios online. En el ejemplo de la figura 2 se utiliza la funcin rteGetLearnerName() desde el Applet del laboratorio, que se encuentra en el SCO, para obtener el valor del nombre del usuario que el LMS posee. Para ello, se debe invocar la funcin doGetValue del APIWrapper quien a su vez llamar a la funcin GetValue que ofrece el LMS. 4 EJEMPLO DE USO: DISEO DEL
SISTEMA DE SUSPENSIN DE UNA RUEDA DE AUTOMVIL
Para la implementacin del caso de estudio se ha creado con EJS un laboratorio virtual (aunque se puede utilizar igualmente con laboratorios remotos) en el que se realiza la simulacin del funcionamiento del amortiguador para la rueda de un automvil con la posibilidad de trabajar en distintos escenarios.
XXXIV Jornadas de Automtica. Terrassa, 4 al 6 de Septiembre de 2013
278
-
Figura 2. Ejemplo de diagrama de secuencia UML con entidades y mtodos relacionados.
Este laboratorio virtual est siendo utilizado en la asignatura Automtica Industrial que se imparte en el segundo curso de todos los grados de la rama de Ingeniera industrial ofertados en la Universidad de Jan (ingeniera elctrica, electrnica industrial, mecnica y organizacin industrial). Dicha asignatura tiene como finalidad general proporcionar al alumno una visin global de la aplicabilidad de la automtica en entornos industriales y la ofrecer los conocimientos bsicos sobre las diferentes tecnologas aplicadas al control de procesos continuos y discretos. Esta prctica se llevara a cabo en el mdulo de identificacin y caracterizacin de sistemas dinmicos. Tiene como objetivos principales: Afianzar en el alumno el concepto de sistema
dinmico. Diferenciar y extraer las caractersticas
fundamentales de las distintas respuestas temporales. Para ello se le da la opcin de ajustar los parmetros del modelo dinmico que caracteriza el sistema.
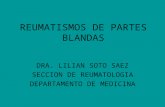
El laboratorio virtual desarrollado muestra el funcionamiento de un amortiguador de coche permitiendo al alumno modificar sus parmetros (K, constante del muelle y B, constante de amortiguamiento) y seleccionar distintos escenarios de funcionamiento. La figura 3 muestra una imagen del sistema real, el esquema del sistema de suspensin y el esquema del sistema completo. Se ha utilizado un ejemplo sencillo que sirva para mostrar el trabajo desarrollado de forma simple, la ecuacin del sistema de suspensin se muestra en (1).
)()0( uyBLuyKmgym (1)
Figura 3. a) Vista delantera de un automvil donde se
aprecia el sistema chasis-rueda. b) Esquema simplificado del sistema de suspensin. c) Esquema
del sistema completo. Donde m es la masa del cuerpo a amortiguar (una cuarta parte del peso del vehculo), y es la distancia de la masa al punto de referencia, u es la distancia del asfalto al punto de referencia, L0 es la distancia del muelle en reposo y g es la aceleracin de la gravedad. En la expresin (2) se muestra la funcin de transferencia que relaciona la evolucin de la altura del chasis, y(t), en funcin del asfalto, u(t), para el sistema en estudio.
KBsmsKBs
sUsYsG
2)()()( (2)
En EJS, el cdigo Java del laboratorio, utiliza las funciones desarrolladas con el fin de interactuar con un LMS. Una vez exportado desde EJS el laboratorio en forma de Applet de Java se incluye dentro de una pgina web que constituye el recurso principal de un SCO. Se ha utilizado un fichero Javascript (APIwrapper) que ayuda a usar el API de SCORM. Las funciones desarrolladas en Java han tenido en cuenta el APIwrapper para simplificar su creacin.
XXXIV Jornadas de Automtica. Terrassa, 4 al 6 de Septiembre de 2013
279
-
En la figura 4 se puede ver un esquema del laboratorio virtual EJS desarrollado incluido en un paquete SCORM una vez importado e incorporado en un LMS.
Figura 4. Esquema del ejemplo desarrollado.
Como se puede observar en dicha figura, el paquete SCORM incluye tres SCO, en SCO1 se ha incluido teora sobre el funcionamiento del sistema de suspensin que simula el laboratorio virtual que el alumno debera leer antes de acceder al mismo. La figura 5 muestra una captura de pantalla del SCO1.
Figura 5. Captura de pantalla del SCO1.
En el SCO2 se ha incluido el laboratorio virtual e instrucciones de las prcticas que debe realizar, se describe con ms detalle en los prximos prrafos. Finalmente, en el SCO3 se han incluido pruebas de evaluacin de los conocimientos adquiridos. Se ha tomado esta estructura por pensar que es la ms adecuada a la hora de implementar la docencia de laboratorios online. Una vez realizadas todas las modificaciones en la estructura SCORM se ha comprimido en formato zip y desde el LMS de la UJA (ILIAS) se ha importado en una carpeta de acceso pblico para su libre acceso [12]. Para poder ejecutarse slo es necesario disponer de un ordenador con acceso a Internet en el que se disponga de un navegador web, la mquina virtual de Java y una configuracin que permita la ejecucin de Applets Java en el navegador. Las funciones utilizadas en este ejemplo para interactuar con el LMS permiten obtener del LMS:
El nombre e identificador del alumno que accede al mdulo SCORM.
La versin de API que se est ejecutando (ofrecida por el LMS).
El estado de terminacin del laboratorio (si est superado).
La fecha y hora de entrada en el laboratorio. Los comentarios guardados por el alumno sobre
el laboratorio en el LMS. Por otro lado se han desarrollado otras funciones que permiten incorporar en el LMS ms datos: Comentarios del alumno que permanecen de
forma persistente en el LMS para su consulta en sesiones e intentos posteriores por parte del laboratorio online.
Informacin referente a la puntuacin alcanzada por el alumno en el intento de superacin de pruebas (para lograr una evaluacin del mismo).
Informacin referente a la superacin del laboratorio.
La figura 6 muestra una captura de pantalla de este ejemplo (SCO2 con el Applet EJS del laboratorio virtual).
Figura 6. Captura de pantalla del Applet EJS del
laboratorio virtual en el mdulo SCORM. En la parte superior se muestra un panel en el que se muestra informacin recogida por el Applet del LMS en el momento de su lanzamiento (que puede ser actualizada en cualquier momento) y una zona en la que el alumno que est trabajando puede guardar los comentarios que estime oportuno en el LMS para recuperarlos cuando desee (para ello debe abrir una ventana supletoria seleccionando la casilla de verificacin desde el mismo panel). En la parte central se muestran una serie de imgenes que ayudan al alumno a reconocer la escena y el funcionamiento que se logra en el amortiguador del
XXXIV Jornadas de Automtica. Terrassa, 4 al 6 de Septiembre de 2013
280
-
coche mientras que en la parte inferior aparecen tres paneles desde los que se pueden configurar las caractersticas del experimento: Panel superior. Los parmetros de las distintas
escenas que se pueden establecer para el funcionamiento del amortiguador.
Panel medio. Permite seleccionar los escenarios de uso del sistema.
Panel inferior. Controla la puesta en marcha y desarrollo de la simulacin as como cambiar los parmetros de configuracin del sistema de amortiguacin y la activacin de una ventana de grficas de resultados.
En la figura 7 se muestra una captura de la ventana de grficos (des/seleccionable desde la ventana principal) que muestra la evolucin de la altura del chasis del vehculo (y), de la carretera (Road), y de la diferencia entre ambas (y-Road).
Figura 7. Captura de pantalla de la ventana
emergente de grficos del Applet. En esta figura se puede observar como la evolucin del chasis (y) es ms suave que la que presenta la carretera (Road, lnea inferior en la grfica) debido al efecto que realiza el sistema de suspensin. Se pueden seleccionar 9 escenarios diferentes en los que se pueden realizar los experimentos, incluso combinarlos secuencialmente, como se desee. Con estas escenas y la posibilidad de cambiar las caractersticas de todas ellas segn los parmetros indicados a continuacin se pueden disear mltiples tipos de prcticas que muestren distintos comportamientos del sistema antes diferentes entradas: Firme plano. Permite estudiar el
comportamiento del sistema ante una entrada constante. Sirve para comprobar el chasis permanece en su posicin de reposo (a una distancia L0 del asfalto).
Subida/Bajada de acera (se puede modificar la altura de la acera). Permite estudiar el comportamiento del sistema ante una entrada de tipo escaln positivo/negativo.
Obstculo/Hueco en firme (se puede modificar la altura/profundidad). Permite estudiar el
comportamiento del sistema ante una entrada de tipo impulso positivo/negativo.
Firme ascendente/descendente (se puede modificar la pendiente). Permite estudiar el comportamiento del sistema ante una entrada tipo rampa ascendente/descendente.
Firme senoidal (se puede modificar frecuencia y amplitud de la oscilacin del perfil del firme). Permite estudiar el comportamiento del sistema ante una entrada senoidal.
Firme irregular. Permite estudiar el comportamiento del sistema ante una entrada variable aleatoria.
En el ejemplo de libre acceso [12] se han diseado dos prcticas muy sencillas. La prctica 1 pide analizar la respuesta en funcin de los diferentes perfiles. Para ello, se debe ejecutar la simulacin, abrir la ventana de grficos y cambiar entre los diferentes escenarios programados. La evaluacin que realiza el laboratorio se basa en la comprobacin de la ejecucin de la simulacin, aadiendo un punto por cada escenario probado. De este modo se tiene la posibilidad de conseguir un mximo de 9 puntos. En la prctica 2 se pide al alumno que asigne valores a las constantes del muelle (K) y de amortiguamiento (B) para que se cumplan ciertas condiciones. En el caso de elegir unos valores dentro de los mrgenes establecidos se consiguen 5 puntos adicionales. La calificacin final obtenida es comunicada al LMS al pulsar el botn Finish para la posible comprobacin del tutor. 5 CONCLUSIONES Y LNEAS DE
FUTURO La integracin de los laboratorios online en los LMS es un proceso que ofrece ventajas a los alumnos y profesores responsables de los mismos. Por ello se trata de una tendencia deseable que se debe desarrollar y potenciar con el fin de que la integracin sea plena. En este trabajo se muestra una herramienta que facilita a los desarrolladores Java crear laboratorios online que consigan esta integracin prcticamente con todos los LMS del mercado. Esta herramienta facilita la incorporacin de informacin procedente del LMS en el laboratorio online enriqueciendo al mismo. Tambin facilita que el alumno pueda incorporar datos permanentes sobre el laboratorio online en el LMS que puede recuperar ayudando a la superacin de las pruebas que se hayan establecido y la incorporacin en el LMS del estado de superacin de las prcticas que se hayan programado as como la puntuacin conseguida. Con el uso de estas funciones se puede facilitar la integracin de los laboratorios online (virtuales o
XXXIV Jornadas de Automtica. Terrassa, 4 al 6 de Septiembre de 2013
281
-
remotos) desarrollados en lenguaje Java mediante su inclusin como Applet en un paquete SCORM que puede ser utilizado por la mayora de los LMS. Se ha desarrollado un ejemplo que logra integrarse con el LMS ILIAS de la UJA mediante el uso de estas funciones y muestra parte del potencial de las mismas. En el ejemplo se ha simulado el sistema de suspensin de la rueda de un vehculo. Este ejemplo permite a los alumnos de los grados de ingeniera de la rama industrial de la Universidad de Jan comprender el funcionamiento de un sistema dinmico y comprobar su comportamiento ante distintas entradas de forma inmediata. Actualmente se est trabajando en el desarrollo de un paquete Java que incluya funciones que permitan trabajar con todos los datos del modelo SCORM y a ms largo plazo se pretende crear una definicin multilenguaje de estas funciones que permitan a los desarrolladores de todos los lenguajes crear laboratorios online usando funciones que permiten interactuar con el LMS de forma sencilla y fcil. Agradecimientos Este trabajo ha sido financiado parcialmente por los proyectos DPI2011-27284, TEP2009-5363 y AGR-6429 Referencias [1] Advanced Distributed Learning, (2012)
SCORM 2004 4th Edition Specification. [Online]. Available: http://www.adlnet.gov/wp-content/uploads/2011/07/SCORM_2004_4ED_v1_1_Doc_Suite.zip
[2] Advanced Distributed Learning, (2013).
SCORM Certified Products. [Online]. Available: http://www.adlnet.gov/wp-content/uploads/2012/04/SCORMCertifiedProductsLocked.xlsx
[3] Aktan, B., Bohus, C.A., Crowl, L.A. & Shor,
M.H. (1996) "Distance learning applied to control engineering laboratories". IEEE Transactions on Education 39 (3) pp.320-326, DOI:10.1109/13.538754.
[4] Dormido, S., Vargas, H., Snchez, J., Dormido,
R., Duro, N. & Morilla, F. (2008) "Developing and implementing virtual and remote labs for control education: The UNED pilot experience". 17th IFAC World Congress 2008, pp. 8159-8164
[5] Esquembre, F. (2003) "Using Easy Java
Simulations to create scientific simulations in
Java". EUROCON 2003. Computer as a Tool. The IEEE Region 8 Vol:1, 2003, pp.:20-23
[6] Feisel, L. & Rosa, A. (2005) The role of the
laboratory in undergraduate engineering education. Journal of Engineering Education, 94(1), pp.121-130.
[7] Gutirrez, E., Trenas, M.A., Ramos, J., Corbera,
F., and Romero, S. (2010) "A new moodle module supporting automatic verification of VHDL-based assignments". Computers & Education 54(2), pp.562-577
[8] Harward, V.J., Alamo, J.A. del, Lerman, S.R.,
Bailey, P.H., Carpenter, J., DeLong, K., Felknor, C., Hardison, J. and Harrison, B. (2008) "The iLab shared architecture: A web services infrastructure to build communities of internet accessible laboratories" Proceedings of the IEEE,Vol:96, Issue:6, pp.931950, DOI: 10.1109/JPROC.2008.921607
[9] Henry, J. (1996) Controls laboratory teaching
via the World Wide Web ASEE Annual Meeting, Washington, D.C.
[10] Mateos, V., Gallardo, A., Richter, T., (2011)
"LiLa booking system: Architecture and conceptual model of a rig booking system for on-line laboratories". International Journal of Online Engineering (iJOE),2011, 7 (4)
[11] Oracle (2013). "Invoking JavaScript code from
an applet". [Online]. Available: http://docs.oracle.com/Javase/tutorial/deployment/applet/invokingJavaScriptFromApplet.html
[12] Ruano, I. (2013) SMC2013, SCORM module
with an example of virtual lab integrated with ILIAS LMS. [Online]. Available: http://dv.ujaen.es/docencia/goto_docencia_sahs_428996.html
[13] San Cristobal, E., Castro, M., Hardward, J.,
Baley, P., DeLong, K. and Hardison, J. (2010) "Integration view of web labs and learning management systems". IEEE EDUCON Education Engineering- The future of Global Learning Engineering Education 81, pp.1409-1417
[14] Torre, L. de la, Snchez, J. P., Heradio, R.,
Carreras, C., Yuste, M., Snchez, J. and Dormido, S., (2012) "UNEDLABS: An example of EJS labs integration into moodle", World Conference on Physics Education, Istambul, Turkey.
XXXIV Jornadas de Automtica. Terrassa, 4 al 6 de Septiembre de 2013
282
-
Patrocinadores:
ISBN:9788461650637
PortadaPresentacinComitsListado de ComunicacionesAutomarBioingenieraControl InteligenteEducacin en AutomticaHerramienta basada en SCORM para la integracin automtica de Laboratorios Online en LMSIldefonso Ruano Ruano, Juan Gmez Ortega, Javier Gmez Garca, Elisabet Estvez Estvez
Ingeniera de ControlModelado y Simulacin de Sistemas DinmicosRobticaSistemas de Tiempo RealVisin por Computador
Contraportada