A3 A2 A3 - ecaths1.s3.amazonaws.comecaths1.s3.amazonaws.com/tallerdemediciones/1654194747... ·...
17
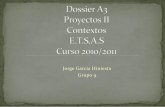
Neumática: DISEÑO SECUENCIAL Ing. Santiago Bueso Hoja 1 / 17 DENOMINACIÓN DE LOS ESQUEMAS DE MANDO: Se utiliza una denominación alfanumérica respetando las siguientes reglas. A, B, C, D, etc. Letras mayúscula /excepto Z) para los actuadores. A1, B1, C1, D1, etc. Letra identificatoria del actuador seguido de 1 (uno) para las válvulas de comando de los actuadores. A2, A4, A6, etc. B2, B4, B6, etc. C2, C4, C6, etc. Letra identificatoria del actuador seguido de números pares para los elementos de la cadena de mando que gobiernan la salida del actuador. A3, A5, A7, etc. B3, B5, B7, etc. C3, C5, C7, etc. Letra identificatoria del actuador seguido de números impares para los elementos de la cadena de mando que gobiernan el retorno del actuador. Z1, Z2, Z3, Z4, etc. Letra Z seguida de números crecientes correlativos, para los elementos de la cadena de mando cuyas funciones no son asignables a un actuador en particular o que son comunes a varios (Unidades de tratamiento, Memorias auxiliares) El siguiente ejemplo nos muestra una aplicación del método: “Un cilindro de simple efecto debe ejercer su acción al oprimir un pulsador. El retorno debe ser automático una vez alcanzada la posición final de carrera. 4 2 5 1 3 2 1 3 2 1 3 A3 A3 A A1 A2 A3 “Un cilindro de doble efecto debe ejercer su acción al oprimir un pulsador, pero solo sí el cilindro se encuentra con su vastago retraído. El retorno será automático una vez alcanzada la posición final de carrera. El ciclo debe completarse aún cuando se mantenga oprimido el pulsador. 4 2 5 1 3 2 1 3 2 1 3 A3 A3 A2 50% 50% 2 1 3 A2 A A1 A4 A3 A2
Transcript of A3 A2 A3 - ecaths1.s3.amazonaws.comecaths1.s3.amazonaws.com/tallerdemediciones/1654194747... ·...

Neumática: DISEÑO SECUENCIAL Ing. Santiago Bueso
Hoja 1 / 17
DENOMINACIÓN DE LOS ESQUEMAS DE MANDO: Se utiliza una denominación
alfanumérica respetando las siguientes reglas.
A, B, C, D, etc. Letras mayúscula /excepto Z) para los actuadores.
A1, B1, C1, D1, etc. Letra identificatoria del actuador seguido de 1 (uno) para las
válvulas de comando de los actuadores.
A2, A4, A6, etc.
B2, B4, B6, etc.
C2, C4, C6, etc.
Letra identificatoria del actuador seguido de números pares para
los elementos de la cadena de mando que gobiernan la salida del
actuador.
A3, A5, A7, etc.
B3, B5, B7, etc.
C3, C5, C7, etc.
Letra identificatoria del actuador seguido de números impares
para los elementos de la cadena de mando que gobiernan el
retorno del actuador.
Z1, Z2, Z3, Z4, etc.
Letra Z seguida de números crecientes correlativos, para los
elementos de la cadena de mando cuyas funciones no son
asignables a un actuador en particular o que son comunes a
varios (Unidades de tratamiento, Memorias auxiliares)
El siguiente ejemplo nos muestra una aplicación del método:
“Un cilindro de simple efecto debe ejercer su acción al oprimir un pulsador. El retorno debe
ser automático una vez alcanzada la posición final de carrera.
4 2
5
1
32
1 3
2
1 3
A3
A3A
A 1
A 2 A 3
“Un cilindro de doble efecto debe ejercer su acción al oprimir un pulsador, pero solo sí el
cilindro se encuentra con su vastago retraído. El retorno será automático una vez alcanzada
la posición final de carrera. El ciclo debe completarse aún cuando se mantenga oprimido el
pulsador.
4 2
5
1
3
2
1 3
2
1 3
A3
A3A2
50%
50%
2
1 3
A2
A
A 1
A 4
A 3
A 2

Neumática: DISEÑO SECUENCIAL Ing. Santiago Bueso
Hoja 2 / 17
Para el ejercicio anterior, el inicio solo podrá efectivizarse solo si son oprimidos
simultáneamente dos pulsadores con enclavamiento.
4 2
5
1
3
2
1 3
2
1 3
A3
A3A2
50%
50%
2
1 3
A2
A
A 1
A 4
A 3
A 2
2
1 3
A 6
MANDOS CON ACTUADORES MÚLTIPLES – DIAGRAMA ESPACIO FASE:
Se denominan “FASES” a cada movimiento del vástago (extensión o retracción) correspondiente a
un cilindro.
Para indicar si el movimiento es de extensión o retracción del vástago; usaremos la siguiente
designación.
1. Nombre del actuador_”+” Extensión del vástago.
2. Nombre del actuador_”-” Retracción del vástago.
Por ejemplo, se podría indicar la siguiente secuencia: A+, B+, A-, B- la cual como vemos esta
compuesta por cuatros fases.
DIAGRAMA ESPACIO-FASE:
En este diagrama se representa “La secuencia de acción de las unidades de trabajo y el
encadenamiento de las señales de mando”.
Se utilizan dos ejes coordenados:
En el eje vertical se representa el estado de los actuadores del sistema utilizando valores
binarios (0-1). El `0`es utilizado para indicar la posición de reposo del actuador mientras que
el ‘1’ identifica el estado del actuador del elemento actuado.
En el eje horizontal se indican las fases en que se subdivide el ciclo de trabajo. Estos pasos o
fases están caracterizados por la modificación o cambio de estado de un elemento del
mando. Estos cambios se indican con líneas verticales auxiliares sobre el diagrama las que
se denominan líneas de fase.
Para la representación se utilizan elementos de señalización, los cuales son aquellos que al ser
actuados emiten una señal capaz de modificar el estado de algún componente del mando.
Así tenemos:
Elementos de
señalización del operador Marcha

Neumática: DISEÑO SECUENCIAL Ing. Santiago Bueso
Hoja 3 / 17
Elementos de
señalización del sistema
Sensor de posición actuado al final del
recorrido o brevemente durante el mismo
Representación de la cadena de señales: La vinculación de los distintos elementos de mando lo
establecen las señales. Estas se representan con líneas, las cuales tienen un origen y un destino. El
origen es un elemento de señalización y el destino es aquel cuyo estado debe ser alterado (cilindro o
válvula). Una flecha indicará el sentido de la señal. Los símbolos gráficos que se utilizan son:
Ramificación de una
señal
S1 S2 S3
Condición lógica “o”
entre señales
(S1+S2+S3)
S1 S2 S3
Condición lógica “y”
entre señales
(S1.S2.S3)
S
Condición lógica “No”
(Negación de una señal)
Ejemplo: Se pretende que dos actuadores neumáticos A y B realicen un ciclo automático con
secuencia A+,B+,A-,B-. El inicio se realizará por medio de un pulsador. El ciclo deberá concluir
aunque el pulsador no se encuentre oprimido y solo podrá iniciarse si fuera completado el ciclo
anterior.
El diagrama espacio-fase correspondiente a la secuencia se muestra a continuación:
A
B
B2
A2
A3
B3
T A+ B+ A- B-
A4
El esquema neumático es el siguiente:
4 2
5
1
3
2
1 3
2
1 3
A3
B2B3
2
1 3
A2
A
A 1
A 4
4 2
5
1
3
2
1 3
B3
A3A2
2
1 3
B2
B
B 1
A 2
A 3 B 2 B 3

Neumática: DISEÑO SECUENCIAL Ing. Santiago Bueso
Hoja 4 / 17
Para la construcción del esquema debemos considerar lo siguiente:
i) Dibujar los cilindros con sus válvulas de potencia correspondiente. Si el vástago comienza
retraído, conectar el conector 2 de la válvula de potencia al conector derecho del cilindro.
ii) Esquematizar a la derecha de cada cilindro los finales de carrera correspondientes, de
acuerdo a lo obtenido en el diagrama espacio-fase.
iii) Debajo de la válvula de potencia colocar los finales de carreras correspondientes al cilindro
en cuestión, a la izquierda los pares y a la derecha los impares.
iv) En conexión “Y” colocar el pulsador con enclavamiento de marcha junto con el último final
de carrera de la secuencia.
Ejemplo: Se pretende que dos actuadores neumáticos A y B realicen un ciclo automático con
secuencia A-,B+,A+,B-. El inicio se realizará por medio de un pulsador. El ciclo deberá concluir
aunque el pulsador no se encuentre oprimido y solo podrá iniciarse si fuera completado el ciclo
anterior.
El diagrama espacio-fase correspondiente a la secuencia se muestra a continuación:
A
B
B2
A2
A3
B3
T A- B+ A+ B-
A5
El esquema neumático es el siguiente:
4 2
5
1
3
2
1 3
2
1 3
A3
B2 B3
2
1 3
A2
A
A 1
A 5
4 2
5
1
3
2
1 3
B3
A3 A2
2
1 3
B2
B
B 1
A 2
A 3
B 2 B 3
En este esquema vemos una manera de solucionar el automatismo neumático. Como observamos, el
cilindro A comienza extendido. Como regla básica siempre que un cilindro comience extendido, los
finales de carrera correspondientes al cilindro, deberán intercambiarse de posición (a la derecha los
pares y a la izquierda los impares) respecto a los finales de carrera correspondientes a un cilindro
que comience retraído (a la derecha los impares y a la izquierda los pares). También debe
permutarse la conexión de la válvula de potencia al cilindro correspondiente (ver ejemplos

Neumática: DISEÑO SECUENCIAL Ing. Santiago Bueso
Hoja 5 / 17
anteriores). El pulsador de marcha siempre debe ir en conexión “Y” (en serie) con el ultimo final de
carrera de la secuencia (en nuestro caso el final de carrera A3).
Otra manera de encontrar la solución a este automatismo es seleccionar una válvula de potencia 5/2
que tenga intercambiada las posiciones. La solución se muestra a continuación. Observar
minuciosamente los cambios producidos en el esquema respecto al esquema anterior.
4 2
5
1
3
2
1 3
2
1 3
A3
B2 B3
2
1 3
A2
A
A 1
A 5
4 2
5
1
3
2
1 3
B3
A3 A2
2
1 3
B2
B
B 1
A 2 A 3 B 2 B 3
Ejercicios:
Realizar las secuencias siguientes, considerando que el comienzo de la secuencia debe realizarse
por medio de un pulsador con enclavamiento.
1. A+, B+, A-, B-
2. A+, B-, A-, B+
3. A-, B+, A+, B-
4. A-, B-, A+, B+
5. A+, B+, C+, A-, B-, C-
6. A+, B+, C-, A-, B-, C+
7. A+, B-, C+, A-, B+, C-
8. A+, B-, C-, A-, B+, C+
9. A-, B+, C+, A+, B-, C-
10. A-, B+, C-, A+, B-, C+
11. A-, B-, C+, A+, B+, C-
12. A-, B-, C-, A+, B+, C+

Neumática: DISEÑO SECUENCIAL Ing. Santiago Bueso
Hoja 6 / 17
MÉTODO DE DISEÑO DE CIRCUITOS EN CASCADA
Supongamos el siguiente ejemplo: Se desea accionar dos cilindros de doble efecto de manera que al
oprimir un pulsador se produzca el siguiente ciclo en forma automática y repetitiva: A+, B+,. B-, A-
El diagrama espacio-fase correspondiente será:
A
B
B2
A2
A3
B3
A+ B+ B- A-
A4
T
Y el esquema neumático será:
4 2
5
1
3
2
1 3
2
1 3
A3
A2 B2
2
1 3
A2
A
A 1
A 4
4 2
5
1
3
2
1 3
B3
A3 B3
2
1 3
B2
B
B 1
A 2
A 3 B 2 B 3
Si observamos detenidamente el esquema podemos de ver que:
a) La señal de B2, que hace salir al cilindro B, está presente en el momento en que es emitida
la señal desde B3 para hacerlo retornar. B2 está presente durante las fases 2 y 3, siendo B3
emitida al final de la fase 2.
Esto significa que tendremos simultáneamente entrada de presión en el mando y la reacción
de la válvula de potencia B1.
4 2
5
1
3
B 1
b) La señal A3 que hace retornar al cilindro A, estará presente cuando deba emitirse la señal de
inicio que la hace salir. A3 estará presente durante las fases 4 y 1.
Las válvulas biestables utilizadas en mandos neumáticos, no responden a una señal mientras tenga
presente la contraria, es decir, la conmutación de la válvula es BLOQUEADA por la señal contraria.

Neumática: DISEÑO SECUENCIAL Ing. Santiago Bueso
Hoja 7 / 17
El ciclo propuesto presentará dos bloqueos que impedirá su desarrollo debido a la presencia en A1 y
B1 de las señales A3 y B2 respectivamente. Las señales que por razones operativas del ciclo, están
presentes cuando deban ingresar las contrarias se denominan SEÑALES BLOQUEANTES. Para
que el ciclo pueda efectuarse, estás deben ser eliminadas.
La técnica en Cascada es un método sistemático generalizado, para un número cualquiera de
actuadores y de señales bloqueantes.
A efectos de facilitar la comprensión del método, efectuaremos la explicación desarrollando en
forma paralela el ejemplo anterior.
Las distintas etapas del método son:
A. Realizar el diagrama espacio-fase correspondiente a la secuencia a desarrollar, indicando en el
mismo el encadenamiento de las señales de mando. Escribir en la parte inferior y en
correspondencia con las fases, la secuencia expresada en forma literal abreviada. En nuestro
caso, la secuencia es: A+, B+, B-, A-.
A
B
B2
A2
A3
B3
A+ B+ B- A-
A4
T
I II
B. Dividir la secuencia expresada en forma literal en grupos, de manera que en un mismo grupo no
queden incluidos movimientos contrarios de un mismo actuador. Esto equivale a que en un
grupo no deberá repetirse la letra correspondiente a un actuador. Para la separación del grupo se
debe seguir la secuencia. Cuando se llegue a una repetición de letra (correspondiente a un
actuador) se iniciará allí un nuevo grupo. Para el ejemplo propuesto, se observa en la figura
anterior la separación en grupos de la secuencia. A partir de esta separación obtenemos el
número de grupos, el cual es 2 para el ejercicio planteado.
C. Determinar el número de memorias auxiliares 5/2 necesarias. Para esto:
1Grupos
NºMemorias
Nº
Para el ejemplo propuesto, el número de memorias auxiliares es igual a 1.
D. Iniciar el esquema neumático, disponiendo en la parte superior los actuadores y sus
correspondientes finales de carreras (obtenidos a partir del diagrama espacio-fase), junto con las
válvulas de comando de los actuadores. En la parte inferior se trazarán líneas paralelas
horizontales que denominaremos “líneas de grupo”. Se trazarán tantas líneas como grupos
tengan la secuencia.
E. Seguidamente se conectarán las memorias auxiliares a las líneas de grupo y estas entre sí en
caso de haber varias memorias auxiliares. El esquema de conexionado se muestra en las figuras
siguientes:

Neumática: DISEÑO SECUENCIAL Ing. Santiago Bueso
Hoja 8 / 17
F.i) Conexionado de una memoria auxiliar a dos líneas de grupo.
I
II
Último Final de
Carrera del Grupo I
Último Final de
Carrera del Grupo II
Z1
I
II
F.ii) Conexionado de dos memorias auxiliares a tres líneas de grupo.
I
II
Último Final de
Carrera del Grupo I
Último Final de
Carrera del Grupo III
Z1
Z2
III
I
II
III
Último Final de
Carrera del Grupo II
F.iii) Conexionado de tres memoria auxiliar a cuatro líneas de grupo.
I
Último Final de
Carrera del Grupo I
Último Final de
Carrera del Grupo III
Z1
Z2
III
I
II
III
Último Final de
Carrera del Grupo II
IV IV
Z3
Último Final de
Carrera del Grupo IV
II
De acuerdo a lo visto, se intuye fácilmente el conexionado de un número mayor de memorias.
Para el ejemplo propuesto, y según lo dicho hasta este párrafo, el esquema neumático será:
I
II
A BB2A2 B3A3
A1 B1
I
II
Z1

Neumática: DISEÑO SECUENCIAL Ing. Santiago Bueso
Hoja 9 / 17
F. Se iniciará ahora el conexionado de los restantes elementos del sistema. Para ello se procederá
siguiendo el orden determinado por la secuencia y de acuerdo con las siguientes reglas:
F.i) Conectar la línea de Grupo I con el piloto de la válvula que origina el primer movimiento
de dicho grupo, intercalando el pulsador de marcha A4 que forma parte de la condición de
arranque. Para el ejercicio propuesto quedará:
I
II
A BB2A2 B3A3
A1 B1
I
II
Z1
A4
Se puede observar que al oprimir el pulsador, se origina el primer movimiento de la secuencia
(en el ejemplo, A+). Este movimiento accionará un fin de carrera que permitirá proseguir la
secuencia (en el ejemplo, B2).
F.ii) Alimentar el fin de carrera accionado por el primer movimiento desde la línea de Grupo I
y su salida dirigirla al piloto de la válvula que origina el segundo movimiento de dicho grupo (o
eventualmente al piloto de la memoria auxiliar para realizar el cambio de grupo en caso
necesario). En el ejemplo, B2 origina el movimiento B+ contenido en el Grupo I; no hay
necesidad de cambio de grupo, por lo tanto la salida de B2 debe ser dirigida de la válvula B1
para originar B+.
I
II
A BB2A2 B3A3
A1 B1
I
II
Z1
A4 B2

Neumática: DISEÑO SECUENCIAL Ing. Santiago Bueso
Hoja 10 / 17
El segundo movimiento se producirá y se accionará un nuevo fin de carrera que permitirá
proseguir la secuencia (en el ejemplo será B3).
F.iii) Alimentar el fin de carrera accionado por el movimiento anterior desde la línea de Grupo I
y la salida dirigirla al piloto de la válvula que origina el siguiente movimiento del grupo, o
eventualmente al piloto de la memoria auxiliar cuando fuere necesario realizar un cambio de
grupo.
En el ejemplo, B3 debe originar un cambio de grupo ya que la acción siguiente (B-) pertenece al
Grupo II (B3 es el último final de carrera del Grupo I y por lo tanto debe cambiar la Memoria).
I
II
A BB2A2 B3A3
A1 B1
I
II
Z1
A4 B2
B3
El cambio de la posición de la memoria hará que la línea II se encuentre bajo presión en tanto la
línea I es puesta a venteo.
F.iv) A partir del cambio de grupo el proceso de conexionado indicado en los tres puntos
anteriores se repite pero aplicado ahora al Grupo II. De este modo, se conectará la línea de
Grupo II al piloto de la válvula que origina el primer movimiento del Grupo II (ver el punto F.i),
no es necesario intercalar el pulsador de marcha pues no es condición en este caso). Para el
ejemplo quedará:
I
II
A BB2A2 B3A3
A1 B1
I
II
Z1
A4 B2
B3

Neumática: DISEÑO SECUENCIAL Ing. Santiago Bueso
Hoja 11 / 17
Al accionarse B3 se presurizará la línea II y en consecuencia ocurrirá B- que accionará el fin de
carrera A3. Se alimentará luego el fin de carrera accionado por este movimiento desde la línea de
Grupo II y su salida será dirigida al piloto de la válvula del siguiente movimiento o eventualmente
al piloto de la memoria auxiliar para un nuevo cambio de grupo, en caso que fuera necesario (ver el
punto F.ii)). En nuestro ejemplo, A3 origina el movimiento A- (no es necesario el cambio de grupo
pues A- esta dentro del Grupo II en el que ya estábamos).
I
II
A BB2A2 B3A3
A1 B1
I
II
Z1
A4
B2
B3
A3
Al accionarse A3 se producirá A-. Este movimiento accionará el fin de carrera A2.
El último final de carrera accionado (A2 en el ejemplo) deberá ser alimentado desde la línea de
Grupo II y su salida (por ser el último del Grupo II) deberá ser dirigida al piloto de la memoria para
cambiar al Grupo I y posibilitar así el comienzo de un nuevo ciclo. El esquema neumático habrá
quedado así concluido.
I
II
A BB2A2 B3A3
A1 B1
I
II
Z1
A4
B2
B3
A3
A2

Neumática: DISEÑO SECUENCIAL Ing. Santiago Bueso
Hoja 12 / 17
Ejemplo: Realizar el esquema neumático aplicando el método de cascada.
Secuencia: A+, B-, B+, C+, C-, A-.
Diagrama Espacio-Fase:
A
B
B3
A2
A3
B2
A+ B- B+ C+
A4
T
I II
C- A-
C
C2
C3
III
Y el esquema neumático será:
I
II
A BB3A2 C2B2
A1 B1
I
II
Z1
A4B3
B2
A3
A2
Z2
C3
IIIIII
C C3A3
C1
C2

Neumática: DISEÑO SECUENCIAL Ing. Santiago Bueso
Hoja 13 / 17
PROBLEMAS
PROBLEMA 1: PUESTO DE INTRODUCCIÓN PARA CORTADORA LASER
En un puesto de introducción se colocan manualmente chapas de acero inoxidable. Al
accionar una válvula de pulsador, entra el vástago del cilindro expulsor (B) a una velocidad
controlada al mismo tiempo que sale el vástago del cilindro de sujeción (A); la pieza avanza y es
sujetada.
Durante un tiempo ajustable t= 5s, tiene lugar la fabricación de un filtro de precisión sin
rebabas, empleando el cabezal cortador de un rayo laser. Tras la mecanización, entra sin
estrangulación el vástago del cilindro de sujeción y a continuación el cilindro expulsor empuja de
golpe el filtro de precisión ya terminado.
PROBLEMA 2: ALIMENTADOR DE PIEZAS.
Uso de dos cilindros de doble efecto para extraer piezas de un cargador y depositarlas sobre un
plano inclinado. Oprimiendo un pulsador, el primer cilindro A extrae una pieza del cargador. A
continuación, el segundo cilindro B desplaza la pieza hasta el plano inclinado. Concluida la
operación, primero retrocede el segundo cilindro y, a continuación, hace lo mismo el primero. Para
que las piezas sean desplazadas adecuadamente, es necesario detectar las posiciones normales y de
final de carrera de los vástagos de ambos cilindros.
A
B
A +, B +, A -, B -
A B
A +, B +, B -, A -

Neumática: DISEÑO SECUENCIAL Ing. Santiago Bueso
Hoja 14 / 17
PROBLEMA 3: ALIMENTADOR DE PIEZAS POR UN PLANO INCLINADO.
Se trata de un alimentador de piezas cilíndricas o esféricas que caen por gravedad por un plano
inclinado. Para organizar la alimentación de forma ordenada y secuencial se disponen de dos
compuertas que habrá que automatizar de manera correcta para que cada vez que se necesite caiga
una y solo una pieza en la parte inferior del plano inclinado.
PROBLEMA 4: AUTOMATIZACIÓN DE UNA OPERACIÓN DE TALADRADO.
Unas piezas de acero cuadradas, son conducidas desde un cargador por gravedad a un taladro,
dónde son sujetadas, mecanizadas y expulsadas. El primer cilindro de doble efecto (A) montado
horizontalmente, desplaza las piezas, desde el cargador por gravedad hasta una posición bajo el
husillo de taladrar y los sujeta contra el tope fijo. Una vez alcanzada, el husillo de taladrar (B), por
medio de la unidad de avance con cilindro neumático, lleva consigo el útil de taladrar. Tras alcanzar
el tope de profundidad ajustable, se inicia el retroceso. Una vez finalizado el retroceso, un cilindro
de doble efecto (C) realiza la expulsión del testero ya mecanizado. Por medio del pulsador de puesta
en marcha se pone en servicio el mando.
A -, A +, B -, B +
A +, B +, B -, A -, C +, C -
A
B
C

Neumática: DISEÑO SECUENCIAL Ing. Santiago Bueso
Hoja 15 / 17
PROBLEMA 5: DISPOSITIVO PARA DOBLAR
Con un útil de accionamiento neumático han de doblarse piezas de chapa. La sujeción de la pieza se
realiza mediante el cilindro de doble efecto “A”. El primer doblado se realiza por la acción de un
cilindro de doble efecto “B” y el segundo doblado por un cilindro igual “C”. El ciclo se inicia
accionando un pulsador de marcha.
PROBLEMA 6: Las tiras de chapa deben estar cortadas con una arista aguda, en uno de los lados con objeto de su
mecanizado posterior. La tira de chapa es colocada en el dispositivo y sujetada por el cilindro
neumático A. El cilindro B corta con la cuchilla la tira de chapa. El cilindro A afloja la tira y el
cilindro C la expulsa.
NOTA: Ojo al establecer la secuencia de trabajo. El cilindro A para sujetar la pieza lo hace en su
movimiento de retroceso. Todos los cilindros son de doble efecto.
A -, B +, B -, A +, C +, C -
A +, B +, B -, C +, C -, A -

Neumática: DISEÑO SECUENCIAL Ing. Santiago Bueso
Hoja 16 / 17
PROBLEMA 7: Con un dispositivo de cizallar ha de cortarse material en barras.
La alimentación de material lo realiza el cilindro de doble efecto B, el cual moverá en su recorrido
al cilindro de doble efecto A, que previamente ha sujetado la barra. Una vez situada la barra contra
el tope fijo, queda sujetada por el cilindro de doble efecto C. Luego el cilindro de doble efecto A
abre, y el cilindro de doble efecto B retrocede a su posición inicial. Después se cizalla la barra con
el cilindro de doble efecto D y a continuación se afloja el cilindro C, y de nuevo el ciclo puede
empezar. Realizar el esquema con ciclo único y ciclo continuo.
PROBLEMA 8: LIMPIEZA DE PIEZAS DE FUNDICIÓN POR CHORRO DE ARENA
Las patas de una pieza de fundición deben limpiarse por chorro de arena. La pieza se coloca
manualmente en el dispositivo de fijación y el cilindro de doble efecto A la aprisiona. A
continuación el cilindro de doble efecto B abre la válvula para la boquilla de la arena, por un tiempo
predeterminado y después cierra la válvula. El cilindro de doble efecto C mueve el dispositivo hacia
la segunda pata y se repite el proceso de chorro de arena, después del cual el cilindro de doble
efecto C regresa a su posición inicial. Por último el cilindro de doble efecto A suelta la pieza y ésta
puede extraerse.
A +, B +, C +, A -, B -, D +, D -, C -
A +, B +, B -, C -, B +, B -, A -, C +

Neumática: DISEÑO SECUENCIAL Ing. Santiago Bueso
Hoja 17 / 17
PROBLEMA 9: DISPOSITIVO DE FRESADO
En un dispositivo de fresado deben trabajarse lateralmente piezas de aluminio.
Mediante un cilindro de doble efecto A, se llevan las piezas procedentes de un cargador de petaca a
un dispositivo de sujeción. El cilindro de doble efecto B, sujeta las piezas. El avance del dispositivo
de sujeción se efectúa mediante la unidad óleo neumática C. Las piezas son fresadas y
posteriormente expulsadas mediante el cilindro de doble efecto D. Por último, la unidad C retorna a
la posición inicial.
A +, B +, A -, C +, B -, D +, D -, C -