7.observador

of 10
-
Upload
armando-vazquez-ramirez -
Category
Documents
-
view
216 -
download
0
Transcript of 7.observador
-
8/4/2019 7.observador
1/10
1
Laboratorio deControl Automatico
Instituto Tecnolgico y de Estudios
Superiores de Monterrey
Campus Tampico
Profesor: Dr. Roberto Rodrguez Said
Armando Vzquez Ramrez 508371
Miguel ngel Martnez Banda 509346
Omar Artemio Flores Flores 510484
Diseo e implementacin de
un observador
-
8/4/2019 7.observador
2/10
2
Tabla de contenido
Tabla de contenido .............................................................................................................................. 2
Objetivo ............................................................................................................................................... 3
Marco Terico ..................................................................................................................................... 3
Diagrama de Bloques .......................................................................................................................... 4
Diseo del observador ........................................................................................................................ 4
Diagramas elctricos con el procedimiento de diseo ....................................................................... 5
Cdigo comentado .............................................................................................................................. 7
Resultados ........................................................................................................................................... 8
Conclusiones ....................................................................................................................................... 9
Bibliografa .......................................................................................................................................... 9
Anexo: Cdigo en Matlab .................................................................................................................. 10
-
8/4/2019 7.observador
3/10
3
Objetivo
Estimar los valores de lasa variables de estado de una planta donde la posiciny la velocidad de un motor representan stas, y la salida es la posicin.
Marco TericoEl diseo de observadores de variables de estados es til cuando son muchas variables lasrequeridas para cerrar el lazo de control y no resulta prctico ni costeable realizarlo, por lo
que se estiman sus valores a partir de un modelo matemtico que debe de converger en los
estados reales de la planta.
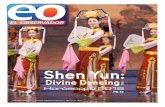
Ilustracin 1 Diagrama a bloques de un lazo cerrado de control con observadores
En la Ilustracin 1 se puede observar la manera en que se implementa el observador. Este
va alimentado nicamente de la seal de error u y de la saliday. La diferencia es que se
debe de implementar un vector de gananciasL de las mismas dimensiones que el vector de
las variables de estados que multiplica a la diferencia de la salida real con la salida estimada
de manera que ayude a que el observador converja rpidamente a una solucin apegada a larealidad. Los estados estimados van al vector de ganancias Kdiseado con el fin de
controlar de cierta manera la planta.
Metodologa
Se discretiz el modelo de espacio de estados con el fin de poder obtenerecuaciones de diferencias para ser implementadas en cdigo.
En MATLAB, usando la instruccin acker, se colocaron polos en 0.1 conel fin de que las estimaciones convergieran rpido y se calcul el vectorL.
Se obtuvieron las ecuaciones de diferencias para implementarlas alobservador.
Se construy un puente H para ser usado como driver. Se implement en LABVIEW el controlador propuesto.
-
8/4/2019 7.observador
4/10
4
Diagrama de Bloques
Los recuadros rellenos son hardware y los recuadros blancos son parte del VI
en LABVIEW.
Diseo del observador
Se obtuvieron las matrices discretas en MATLAB
a =x1 x2
x1 1 0.04305x2 0.002016 0.9148
b =u1
x1 1.951x2 107.4
c =x1 x2
y1 1 0
y despus se convirti la expresin matricial a un sistema de 2 ecuacionessimultneas de la siguiente forma:
( ) () () [() ()]
Referencia RESTA
Plantamodelada
como
espacio deestados
Controlador
(Vector K)PWM
Salida
Analgicade la DAQ
Driver
Puente H
Motor
DC
Encoder
ptico
Entrada
Analgicade la DAQ
Velocidad estimada
Ecuaciones
de
diferenciasdel
observador
-
8/4/2019 7.observador
5/10
5
Obteniendo, de forma ya simplificada
( ) () () () ()( ) () () () ()
Donde x1 es posicin, x2 velocidad, u es la seal del error y y es la salidaposicin.
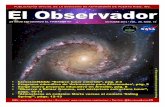
Diagramas elctricos con el procedimiento de diseo
Se realiz un driver con acoplamiento ptico con el fin de aislar la DAQ delcircuito de potencia y evitar daar la tarjeta DAQ.
Cantidad Componente Modelo2 R1 27 2 R2 1k 4 Diodos 1N40044 Q1 2N22224 Q2 TIP 321 M Motor pololu de
12V
-
8/4/2019 7.observador
6/10
6
-
8/4/2019 7.observador
7/10
7
Cdigo comentado
1. DAQ assistant de adquisicin de posicin configurado como contador digital2. Variable local de posicin real3. Variable local de posicin deseada4. Velocidad estimada obtenida de la resta de la posicin actual menos la anterior entre
el tiempo de muestreo.
5. Variable local de velocidad estimada por el observador6. Posicin estimada por el observador7. Grfica de posicin8. Grfica de velocidad9. Variable local de la seal error, resta de posicin deseada menos seal
manipuladora obtenida en (11).
10.Cdigo donde se implementan las ecuaciones de diferencias obtenidas.11.Multiplicacin de las variables de estado por el vector K, obteniendo as la seal
manipuladora.
12.Nodo de resta donde se obtiene (9)13.Decisin lgica operada por un switch que permite prender o apagar el controlador
sin dejar de ejecutar el VI.
-
8/4/2019 7.observador
8/10
8
14.Condicin lgica del bloque (15) para saber el signo del error y as decidirel sentido de giro.
15.Bloque condicional de casos que cambia el canal analgico empleado parala salida con el fin de cambiar de sentido de giro.
16.Generador de PWM a 0-5V a 800Hz.17.Salida ao0, sentido de giro positivo18.Salida ao1, sentido de giro negativo
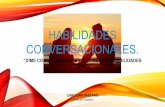
Resultados
El resultado fue satisfactorio pues el control se mantuvo estable cuando se lealiment con la velocidad estimada por el observador ya que ste convergirpidamente
En la grfica de posicin la lnea roja es la posicin deseada, la lnea verde es la posicinestimada por el observador y la lnea blanca es la seal de posicin real generada por el
encoder ptico. Claramente se puede apreciar que comportamiento del sistema coincide con
es bastante estable.
En la grfica de velocidad la lnea blanca representa la velocidad estimada con la resta deposiciones y la lnea roja representa la velocidad estimada por el observador. A pesar de los
-
8/4/2019 7.observador
9/10
9
sobretiros en los transitorios, las seales convergen y permiten un control suave del
proceso.
ConclusionesEl desempeo del controlador fue el esperado ante los diferentes cambios dereferencia que se le dieron, incluso cuando se realiment con la velocidadestimada. En este caso, se requiri aproximarse bastante al 0, por ello seeligieron los polos de L en 0.1, para que el observador convergiera rpidamente.Resulta ms conveniente esta tcnica pues con los clculos correctos seeliminan los problemas de ruido y resulta ms prctico costeable de ejecutarsin sacrificar las virtudes del control por espacio de estados.
BibliografaFernndez , R., Flury, C., & Di Benedetto, A. (s.f.).Dinmica de sistemas y control.Recuperado el 26 de abril de 2011, de CAPITULO VIII: Diseo en el espacio de
estados: http://www.ib.cnea.gov.ar/~dsc/capitulo8/Capitulo8.htmLopez Hurtado, I. (2010). Control Engineering Lab Notes.
-
8/4/2019 7.observador
10/10
10
Anexo: Cdigo en Matlab
%% Entradas
Mp=15;Tss=.5;
sigma=-4/Tss;ji=sqrt((log(Mp/100)^2/(pi^2+(log(Mp/100))^2)));
wn=sigma/ji;
wd=wn*sqrt(1-ji^2);
p1=sigma+j*wd;
p2=sigma-j*wd;
P=[p1 p2];K=place(A,B,P);
%% VERIFICANDOAF=A-B*K;
test=eig(AF);
% los valores de test deben de ser igual a los de P
%% Grfica de la respuesta
modelo=ss(AF,B,C,D);
step(modelo)