4 Evolucion
4
4 Evolución
-
Upload
edfreddy-pgarcia -
Category
Documents
-
view
2 -
download
0
description
Evolucion
Transcript of 4 Evolucion
4) Evolucion
4
Evolucin
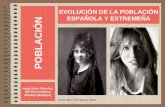
En las ltimas cuatro dcadas la robtica ha pasado de ser un mito literario a una realidad imprescindible en cualquier proceso productivo. En sus comienzos, all por la dcada del cincuenta fue discutida y hasta negada. Con el avance de la tecnologa y la aceptacin de la humanidad de su evidente importancia y elocuente impacto en la produccin en casi todos los rubros, la robtica fue tomando cada vez mas importancia hasta que en los aos noventa alcanzo su madurez, logrando un importante crecimiento en la demanda y una aceptacin total en la industria.El robot como mquina lleva un desarrollo independiente del trmino robot. Luego de los primeros autmatas previamente descritos, la mayora posean aspecto humano o al menos de algn ser vivo, tomaron la posta en la carrera de la automatizacin sus progenitores ms directos, los tele manipuladores. El primero fue desarrollado por R.C. Goertz del Argonne National Laboratory (1948). Como su nombre lo indica, estos provean al usuario la posibilidad de operar a distancia, es decir, a travs del uso de un tele manipulador, una persona puede acceder a determinado proceso de manera remota (ver imagen 4.1). Fue y es de gran aplicacin en circunstancias donde la presencia de un operario en determinado lugar geogrfico pueda resultar peligroso o perjudicial para la salud del mismo.
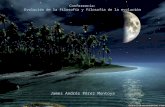
El esquema de este dispositivo es el de maestro esclavo, donde el maestro o manipulador se encuentra en una zona segura y es el esclavo el que esta en contacto con los materiales ubicados en zona de riesgo. Algunos de los casos mas frecuentes de utilizacin eran el manipulamiento de materiales peligrosos tales como materiales radioactivos o sustancias qumicas toxicas, o en casos donde el lugar donde se necesitara el desarrollo de la actividad tuviera condiciones no propicias para el bienestar del manipulador. Aos ms tarde, en 1954, Goertz hizo uso de la tecnologa electrnica y del servo control sustituyendo la transmisin mecnica por otra elctrica y desarrollando as el primer tele manipulador con servo control bilateral. Otro de los pioneros de la tele manipulacin fue Ralph Mosher, ingeniero de la General Electric que en 1958 desarroll un dispositivo denominado Handy-Man, consistente en dos brazos mecnicos tele operados mediante un maestro del tipo denominado exoesqueleto (ver imagen 4.2). Junto a la industria nuclear, a lo largo de los aos sesenta la industria submarina comenz a interesarse por el uso de los tele manipuladores. A este inters se sum la industria espacial en los aos setenta [FDR].
La evolucin de los tele manipuladores a lo largo de los ltimos aos no ha sido tan espectacular como la de los robots. Recluidos en un mercado selecto y limitado (industria nuclear, militar, espacial, etc.) son en general desconocidos y comparativamente poco atendidos por los investigadores y usuarios de robots. Por su propia concepcin, un tele manipulador precisa del mando continuo de un operador, y salvo por las aportaciones incorporadas con el concepto del control supervisado y la mejora de la tele presencia promovida hoy en da por la realidad virtual, sus capacidades no han variado mucho respecto a las de sus orgenes.La sustitucin del operador por un programa de computadora que controlase los movimientos del manipulador dio paso al concepto de robot.Telemanipuladores
Handy - Man