
4. ALGORÍTMO HEURÍSTICO DE CONTROL DE...
25
Interfaz Gráfica para el control de tensiones y potencia reactiva en los transformadores frontera Trasporte-Distribución Pág. 22 4. ALGORÍTMO HEURÍSTICO DE CONTROL DE TENSIONES Y FLUJOS DE POTENCIA REACTIVA EN LOS TRANSFORMADORES FRONTERA ENTRE TRANSPORTE Y DISTRIBUCIÓN. En este proyecto se presenta una interfaz gráfica basada en algoritmo heurístico de control para las tensiones y los flujos de potencia reactiva en los transformadores frontera entre el transporte y la distribución. Éste está basado en sensibilidades. Ambas tareas de control tienen una íntima relación por lo que se plantea una estructura del control conjunto pero secuencial basada en términos de prioridad. Primero un control de las tensiones y segundo un control de los flujos de potencia reactiva. Con esta herramienta se pretende proporcionar un apoyo al Operador del Sistema para que se satisfagan los requisitos impuestos por el Proceso de Operación 7.4 sobre el control de tensiones y potencia reactiva. Como se ha comentado, los problemas a corregir son los desvíos de las tensiones en los nudos y los flujos de potencia reactiva respecto a sus límites establecidos. Por tanto se puede decir que el proceso de control base para el que se diseña la interfaz gráfica se divide en estas dos fases y por este orden de prioridad: Corrección de tensiones, teniendo en cuenta el estado de los transformadores, para no provocar un empeoramiento de los flujos y asegurar que la actuación que se realice hará no salir de límites a los valores que están dentro y aquellos que estén ya fuera de limites no provocarles un empeoramiento. Corrección de flujos, sujeto a no empeorar el sistema. De nuevo, se asegurará que los valores que están dentro de límites no saldrán de estos y los que estén fuera no serán empeorados.
Transcript of 4. ALGORÍTMO HEURÍSTICO DE CONTROL DE...

Interfaz Gráfica para el control de tensiones y potencia reactiva en los transformadores frontera
Trasporte-Distribución
Pág. 22
4. ALGORÍTMO HEURÍSTICO DE CONTROL DE TENSIONES Y
FLUJOS DE POTENCIA REACTIVA EN LOS TRANSFORMADORES
FRONTERA ENTRE TRANSPORTE Y DISTRIBUCIÓN.
En este proyecto se presenta una interfaz gráfica basada en algoritmo heurístico de
control para las tensiones y los flujos de potencia reactiva en los transformadores frontera
entre el transporte y la distribución. Éste está basado en sensibilidades. Ambas tareas de
control tienen una íntima relación por lo que se plantea una estructura del control conjunto
pero secuencial basada en términos de prioridad. Primero un control de las tensiones y
segundo un control de los flujos de potencia reactiva. Con esta herramienta se pretende
proporcionar un apoyo al Operador del Sistema para que se satisfagan los requisitos
impuestos por el Proceso de Operación 7.4 sobre el control de tensiones y potencia reactiva.
Como se ha comentado, los problemas a corregir son los desvíos de las tensiones en
los nudos y los flujos de potencia reactiva respecto a sus límites establecidos. Por tanto se
puede decir que el proceso de control base para el que se diseña la interfaz gráfica se divide
en estas dos fases y por este orden de prioridad:
Corrección de tensiones, teniendo en cuenta el estado de los transformadores,
para no provocar un empeoramiento de los flujos y asegurar que la actuación
que se realice hará no salir de límites a los valores que están dentro y aquellos
que estén ya fuera de limites no provocarles un empeoramiento.
Corrección de flujos, sujeto a no empeorar el sistema. De nuevo, se asegurará
que los valores que están dentro de límites no saldrán de estos y los que estén
fuera no serán empeorados.

Interfaz Gráfica para el control de tensiones y potencia reactiva en los transformadores frontera
Trasporte-Distribución
Pág. 23
Operando sobre las variables de control según el orden anterior se tendrá en primer
lugar un perfil de tensiones seguro y, en segundo lugar, se mejorará el flujo de potencia
reactiva. Estos dos problemas no son independientes, aunque se traten de forma diferenciada,
en cada etapa de control se opera con una máxima: ninguna actuación puede empeorar el
estado del que se parte en ninguna de las variables dependientes del problema. Por lo
tanto el único movimiento permitido con las actuaciones de los controles es a proporcionar un
estado mejor en su conjunto.
Figura 4-1 Proceso corrección de estado de la Red
En la Figura 4-1 se puede observar la solución adoptada para el tratamiento de las
situaciones que se han descrito. El usuario tendrá como entrada los datos correspondientes al
estado y a la topología de una red eléctrica. Decidirá las variables a ser tratadas y la zona de
influencia sobre la que se quiere analizar e interactuar. Entonces se tiene un sistema definido
y al que se le aplican las correcciones necesarias para su optimización, control de tensiones

Interfaz Gráfica para el control de tensiones y potencia reactiva en los transformadores frontera
Trasporte-Distribución
Pág. 24
primero y control de flujos después. Ambos módulos tienen un mismo diagrama de control
pero en cada etapa se considera una variable para el control. El diagrama de flujo de cada
etapa de control se muestra en la Figura 4-2.
Variables del sistema
Calculo de las actuaciones
maximas
Calculo matriz
sensibilidad
Estado de la Red
NO pueden empeorar los
niveles a corregir
Coeficientes de eficiencia
3 Variables de Control con mayor
CE
Peor Variable de
control
Calculo Actuación para solventar
problema
Reparto carga tras actuación de la mejor variable
Ultima variable?
Fin
SI
Eliminamos variable utilizada
NO
Limites máximos técnicos y reglados
Figura 4-2 Algoritmo del Módulo de Control

Interfaz Gráfica para el control de tensiones y potencia reactiva en los transformadores frontera
Trasporte-Distribución
Pág. 25
4.1 DEFINICIÓN DE LAS VARIABLES
4.1.1 VARIABLES DE CONTROL
Lo primero para poder actuar en el sistema es establecer las variables de control sobre
las que se actuarán. Dentro del sistema eléctrico hay muchos elementos o mecanismos que
pueden ser utilizados como tal, lo ideal sería poder utilizar todos ellos para conseguir valores
adecuados y de calidad en la red, sin embargo, esto haría que la herramienta de control fuera
muy compleja y con un alto coste computacional. Estas características no son recomendables
para tener un control en tiempo real y lo que se pretende en este trabajo es proporcionar una
herramienta que facilite la interacción hombre/máquina en tiempo real.
Por todo ello se tiene que reducir a un determinado número de variables de entre todas,
para el caso de este método y debido a diversos estudios realizados por diferentes autores, las
variables de control recomendables para utilizar serán las siguientes:
- Tensiones en los nudos de generación, aumentado o disminuyendo el valor en por
unidad de la tensión en el nudo.
Figura 4-3 Centro de generación

Interfaz Gráfica para el control de tensiones y potencia reactiva en los transformadores frontera
Trasporte-Distribución
Pág. 26
- Las tomas de los transformadores con tomas variables, variando los niveles de tensión.
Figura 4-4 Transformador con tomas regulables
- Los Controladores de Reactiva; las baterías de condensadores, los inductores y los
FACTS y STATCOM, añadiendo o disminuyendo la reactiva de la red.
Figura 4-5 Batería de condensadores
Las variables de control se engloban dentro de un vector (u) en el orden tal y como se muestra
para su posterior manejo dentro del cálculo que se llevará a cabo.
bat
g
tu Q
V
⎛ ⎞⎜ ⎟
= ⎜ ⎟⎜ ⎟⎝ ⎠
(4-1)
Donde:
bat
g
t toma en transformadores con toma variableQ Potencia reactiva de los controladores de reactivaV tensión asociada a los nudos PV y al Slack
= =
=
Interfaz Gráfica para el control de tensiones y potencia reactiva en los transformadores frontera
Trasporte-Distribución
Pág. 27
4.1.2 VARIABLES DEPENDIENTES
Existe otro tipo de variables que intervienen en el problema, son las denominadas
“variables dependientes”. A este grupo de variables pertenecen las magnitudes que se
pretenden controlar y con ello mantener sus valores dentro de unos límites aceptables. Al
igual que ocurre con las variables de control hay numerosos factores que se pueden supervisar
pero manejar todos es algo inviable.
De entre todos los posibles, en este trabajo se determinan que las variables a observar y
controlar serán las que se indican a continuación:
- Valor de la tensión en los nudos de consumo ( Nudos PQ )
- La fase de todas las tensiones en los nudos excepto el del nudo de referencia o slack.
- La potencia reactiva asociada a los nudos de generación (Nudos PV) y al slack.
- La potencia activa asociada al nudo slack.
Definidas las variables que intervendrán en la resolución del problema presente, lo siguiente
será determinar una serie de parámetros que indicaran las correcciones a realizar en el sistema
según las condiciones de contorno.
Al igual que las variables de control, las variables dependientes se engloban en un vector (X).
n
PQ
g
slack
VX
Q
P
θ⎛ ⎞⎜ ⎟⎜ ⎟= ⎜ ⎟⎜ ⎟⎜ ⎟⎝ ⎠
(4-2)
Donde los parámetros que definen las variables son:
n
PQ
g
slack
fase de las tensiones de los nudos excepto el SlackV tensión en nudos PQ
Q potencia reactiva asociada a nudos PV y Slack
P potencia activa asociada al Slack
θ = =
=
=
Interfaz Gráfica para el control de tensiones y potencia reactiva en los transformadores frontera
Trasporte-Distribución
Pág. 28
4.2 CÁLCULO MATRIZ SENSIBILIDAD
Lo más inmediato es conocer la relación existente entre las variables de control y las
variables dependientes. Esto se obtiene mediante el cálculo de la matriz de sensibilidad. Esta
matriz proporcionará el efecto que sobre las variables dependientes provoca un cambio
unitario en los valores de cada una de las variables de control.
Los mecanismos para el control de tensiones y para el control de flujos de potencia
reactiva son análogos pero con algunas diferencias. A continuación se describe la obtención
de la matriz de sensibilidades para ambos casos.
4.2.1 CASO CONTROL DE TENSIONES
El proceso para obtener esta matriz/relación es resolver las ecuaciones de la red para
las variables en las que se trabajan.
Se parte de las ecuaciones de la red que relacionan las variables dependientes (X) con
las variables de control (u):
h (X,u)= 0 ( 4-3)
La operación para su minimización se traduce a la resolución de la siguiente ecuación:
x uH · X + H · u = 0Δ Δ (4-4)
Donde Hx es el Jacobiano extendido de la red y Hu son las derivadas de las ecuaciones
de la red respecto a las variables de control. representa los cambios en las variables
dependientes, mientras que representa las actuaciones realizadas sobre el sistema.

Interfaz Gráfica para el control de tensiones y potencia reactiva en los transformadores frontera
Trasporte-Distribución
Pág. 29
x
hH =x
δδ
(4-5)
uhH =u
δδ
(4-6)
Operando sobre el resultado anterior se puede expresar la relación entre las
actuaciones inducidas y los efectos provocados:
1· ·x xX H H u−Δ = − Δ (4-7)
Al producto 1·x uS H H−= − es lo que se denomina matriz de sensibilidad (S). Por lo
tanto:
·X S uΔ = Δ (4-8)
Si se desarrollan las ecuaciones de la red para todos los nudos de la red, las
expresiones a minimizar serán:
esp cal
i i i
esp cali i i
P P P
Q Q Q
⎧Δ = −⎪⎨
Δ = −⎪⎩ (4-9)
La variación de potencia que experimenta un nudo es la diferencia entre la potencia específica
y la potencia calculada o instantánea. Estás ecuaciones se igualarán a cero y se derivarán para
su minimización.
La potencia específica, por otro lado, es la diferencia entre la potencia que se genera y la que
se consume en el nudo de cálculo:
esp gen con
i i iesp gen coni i i
P P P
Q Q Q
⎧ = −⎪⎨
= −⎪⎩ (4-10)

Interfaz Gráfica para el control de tensiones y potencia reactiva en los transformadores frontera
Trasporte-Distribución
Pág. 30
Para el cálculo de las potencias calculadas habrá que tener en cuenta la matriz de admitancias
de nudos representada por la expresión (4-11), con su parte real y parte imaginaria:
ij ij ijY G j B= + ⋅ (4-11)
Las expresiones para el cálculo de las potencias calculadas son las que se indican a
continuación, en las que indica la fase de las tensiones en el nudo respecto al slack:
· ·( ·cos · )
· ·( · ·cos )
cali i j ij ij ij ij
j red
cali i j ij ij ij ij
j red
ij i j
P V V G B sen
Q V V G sen B
Con
θ θ
θ θ
θ θ θ
∀ ∈
∀ ∈
⎧ = +⎪⎨
= −⎪⎩
= −
∑
∑ (4-12)
Finalmente las ecuaciones de red que quedan para minimizar son:
( · ·( ·cos · )) 0
( · ·( · ·cos )) 0
gen coni i i i j ij ij ij ij
j red
gen coni i i i j ij ij ij ij
j red
ij i j
P P P V V G B sen
Q Q Q V V G sen B
Con
θ θ
θ θ
θ θ θ
∀ ∈
∀ ∈
⎧Δ = − − + =⎪⎨
Δ = − − − =⎪⎩
= −
∑
∑
(4-13)
Se particularizan para las variables dependientes (X) y de control elegidas (u).
Derivando las ecuaciones de red obtenidas finalmente se tiene por un lado que Hx tiene la
siguiente forma (expresión 4-14):

Interfaz Gráfica para el control de tensiones y potencia reactiva en los transformadores frontera
Trasporte-Distribución
Pág. 31
l l l l
l PQ g slack
PQ PQ PQ PQ
l PQ g slackx
g g g g
l PQ g slack
slack slack slack slack
l PQ g slack
P P P PV Q P
Q Q Q QV Q P
HQ Q Q Q
V Q P
P P P PV Q P
θ
θ
θ
θ
∂Δ ∂Δ ∂Δ ∂Δ⎡ ⎤⎢ ⎥∂ ∂ ∂ ∂⎢ ⎥⎢ ⎥∂Δ ∂Δ ∂Δ ∂Δ⎢ ⎥
∂ ∂ ∂ ∂⎢ ⎥= ⎢ ⎥∂Δ ∂Δ ∂Δ ∂Δ⎢ ⎥
⎢ ⎥∂ ∂ ∂ ∂⎢ ⎥
∂Δ ∂Δ ∂Δ ∂Δ⎢ ⎥⎢ ⎥∂ ∂ ∂ ∂⎣ ⎦
(4-14)
Y por otro lado se tiene la matriz Hu:
l l l
bat g
PQ PQ PQ
bat gu
g g g
bat g
slack slack slack
bat g
P P Pt Q V
Q Q Qt Q V
HQ Q Qt Q V
P P Pt Q V
∂Δ ∂Δ ∂Δ⎡ ⎤⎢ ⎥∂ ∂ ∂⎢ ⎥⎢ ⎥∂Δ ∂Δ ∂Δ⎢ ⎥
∂ ∂ ∂⎢ ⎥= ⎢ ⎥∂Δ ∂Δ ∂Δ⎢ ⎥
⎢ ⎥∂ ∂ ∂⎢ ⎥
∂Δ ∂Δ ∂Δ⎢ ⎥⎢ ⎥∂ ∂ ∂⎣ ⎦
(4-15)
Con estas ecuaciones se consigue operar matemáticamente y resolver el problema
inicialmente planteado de minimización para las variables seleccionadas. Por ejemplo para el
elemento g
l
Qθ
∂Δ
∂ de la matriz Hx se tiene lo siguiente:
· ( · cos · ( )
· ( ·cos · ) ( )i j ij ij ij ij
g
i ij ij ij ijl ij j i
V V G B sen i jQV G B sen i j
θ θ
θ θθ∀ ≠
+ ) ≠⎧∂Δ ⎪= ⎨− + ≠∂ ⎪⎩∑
(4-16)

Interfaz Gráfica para el control de tensiones y potencia reactiva en los transformadores frontera
Trasporte-Distribución
Pág. 32
El resto de elementos que componen la matriz se obtienen de forma análoga a la expuesta en
el ejemplo anterior.
Los resultados obtenidos indican los cambios de los valores en las variables dependientes que
se obtendrán en proporción a las actuaciones acometidas sobre las variables de control.
Figura 4-6 Sentido de la relación de Sensibilidades
El planteamiento del problema que se trata de resolver en este trabajo es justamente el
contrario al obtenido anteriormente, es decir, lo que se requiere es que el sentido de la flecha
representada en el dibujo anterior sea el contrario. En el caso que ocupa se pretende calcular
las actuaciones a aplicar sobre las variables de control para unos incrementos de las variables
dependientes, que serán los datos de partida para la mejora del estado del sistema.
Existe un problema en invertir el sentido del cálculo deseado, este es que la matriz de
sensibilidad no se puede invertir, aunque se puede analizar de qué manera relaciona las
variables de control con las variables dependientes. Sin embargo trabajos anteriores en los que
se trata el control de tensiones se demuestra que las relaciones de las tensiones en los nudos
con las variables de control son muy lineales y que su suposición de linealidad supone un
error insignificante respecto a la relación real en lo que a cálculos se refiere, por lo que la
aproximación es muy exacta.
De este modo, para el control de tensiones, se puede establecer la siguiente igualdad:
·i ij jV S uΔ = Δ (4-17)
Esta es la expresión que se deseaba establecer para así tener una predicción del
comportamiento de las tensiones de la red al modificar una variable de control.

Interfaz Gráfica para el control de tensiones y potencia reactiva en los transformadores frontera
Trasporte-Distribución
Pág. 33
4.2.2 CASO CONTROL DE FLUJOS
La matriz de sensibilidad que se utiliza en el control de flujos se obtiene de la
información que nos proporciona el siguiente problema de optimización.
min ( , ). . ( , ) 0
f X us a h X u
=
(4-18)
Donde ( , )f X u es una función objetivo que contiene la información sobre el flujo de potencia
reactiva En particular, para este proyecto, la función objetivo es el flujo de potencia reactiva a
través de los transformadores con tomas, esto equivale a expresar f(X,u) de la siguiente forma:
( , ) dsf X u Q= − (4-19)
Figura 4-7 Flujo de Potencia Reactiva a través transformador con tomas
Teniendo en cuenta por otro lado la matriz de admitancias de las ramas de la red entre los
nudos s y d:
·sd sd sdY G j B= + (4-20)
Se tiene que la expresión de la función a minimizar f(X,u) es la siguiente:

Interfaz Gráfica para el control de tensiones y potencia reactiva en los transformadores frontera
Trasporte-Distribución
Pág. 34
2 ·( , ) · ·( · ·cos )d ssd d sd ds sd ds
ds d s
V Vf X u B V G sen Bt
donde
θ θ
θ θ θ
= + −
= − (4-21)
Se impone en su resolución que se cumplan las ecuaciones de la red. Así cualquier solución
será un estado factible.
Para su resolución es necesario plantear la ecuación Lagrangiana y derivar respecto a las
variables dependientes y de control, para posteriormente resolver las ecuaciones que se
presentan:
( , ) · ( , )L f X u h X uλ= + (4-22)
· 0· 0
x x x
u u u
L f HL f H
λλ
∇ = ∇ + =⎧⎨∇ = ∇ + =⎩
(4-23)
La variación de las variables dependientes respecto a las variables de control se encuentra
representada en el gradiente reducido u L∇ .
Despejando el término λ de la primera ecuación del sistema anterior se tiene que:
1·x xf Hλ −= −∇ (4-24)
Sustituyendo este valor en la otra ecuación se tiene:
1· · 0u u x x uL f f H H−∇ = ∇ − ∇ = (4-25)
Anteriormente, para el control de tensiones, se obtuvo la expresión para la matriz de
sensibilidad:
1·x uS H H−= − (4-26)
Interfaz Gráfica para el control de tensiones y potencia reactiva en los transformadores frontera
Trasporte-Distribución
Pág. 35
Identificando términos:
· 0u u xL f f S∇ = ∇ + ∇ = (4-27)
Finalmente se puede conocer la variación de f(X,u) en función de los elementos existentes en
la red y sus características.
Al igual que en el control de tensiones se tiene la información en el sentido contrario del
deseado, pero como antes, existe un fuerte linealidad entre el flujo de reactiva a través del
transformador y las variables de control que se utilizan. Por ello se puede calcular las
actuaciones a realizar sobre las variables de control dada una variación de los flujos de
reactiva.
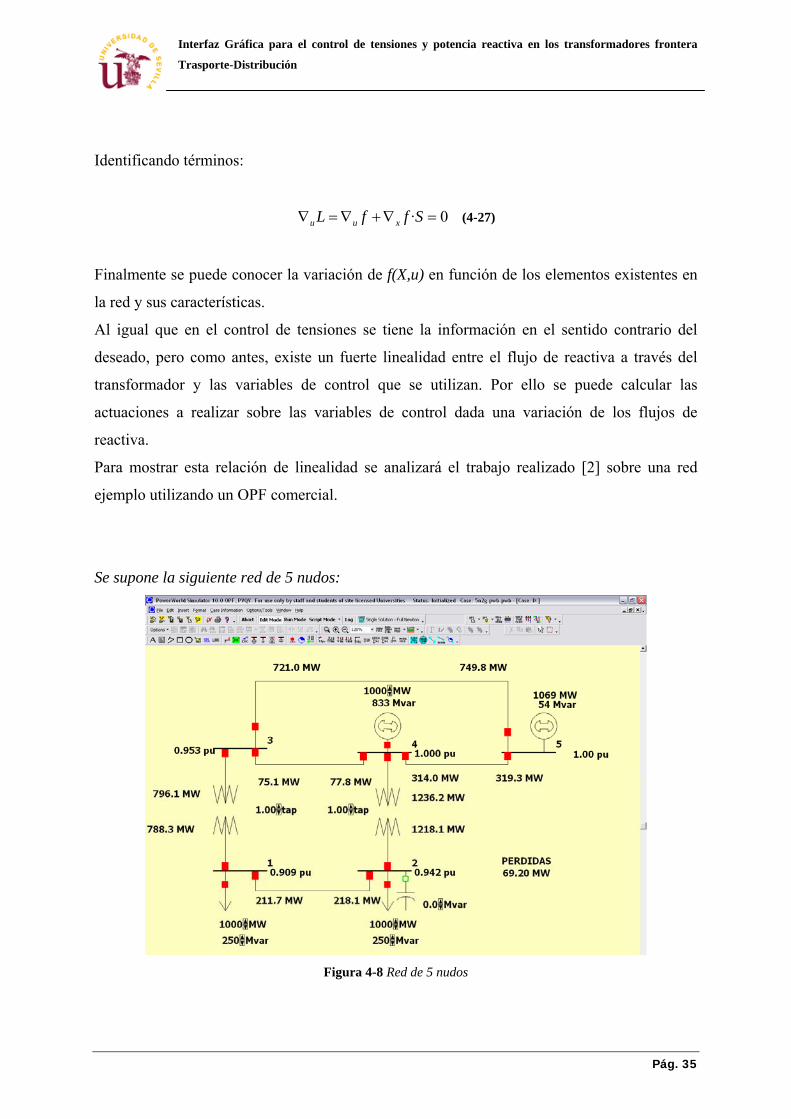
Para mostrar esta relación de linealidad se analizará el trabajo realizado [2] sobre una red
ejemplo utilizando un OPF comercial.
Se supone la siguiente red de 5 nudos:
Figura 4-8 Red de 5 nudos

Interfaz Gráfica para el control de tensiones y potencia reactiva en los transformadores frontera
Trasporte-Distribución
Pág. 36
De la red de diseño se determinan las siguientes variables:
- Nudo slack nudo 5
- Variables dependientes:
o Tensiones en los nudos 1, 2 y 3 (V1, V2 y V3).
o Flujo de reactiva a través de las líneas 1-3 y 2-4 ( Q1-3 y –Q2-4 )
- Variables de control:
o Tensiones en los nudos de generación 4 y 5 (V4 y V5).
o Toma de los transformadores 1-3 y 2-4 (t1-3 y t2-4).
o Batería de condensadores en el nudo 2 ( Qbat,2 )
Con estas variables y operando sobre la red mediante el programa comercial OPF se
obtienen los siguientes resultados:
Figura 4-9 Relación Potencia Reactiva-transformador con tomas

Interfaz Gráfica para el control de tensiones y potencia reactiva en los transformadores frontera
Trasporte-Distribución
Pág. 37
Figura 4-10 Relación Potencia Reactiva-Tensión en generador
Figura 4-11 Relación Potencia Reactiva-Batería condensadores

Interfaz Gráfica para el control de tensiones y potencia reactiva en los transformadores frontera
Trasporte-Distribución
Pág. 38
A la vista de los resultados se puede ver como existe una relación de casi linealidad entre los
flujos de potencia reactiva y las variables de control relacionadas con el control de flujos.
Al existir una relación lineal entre las variables dependientes y las variables de control se
puede obtener relaciones de la actuación a realizar y la variación a realizar a través de la
matriz de sensibilidad.
·i u ij jf L u con i transformadorΔ = ∇ Δ = (4-28)
4.2.3 RESULTADOS/CONCLUSIONES
A partir de estas relaciones de linealidad obtenidas se establecen tres pilares sobre los
que se basará la corrección de tensiones y flujos que en este trabajo se acomete.
Estas tres bases son:
Las tensiones en los nudos tienen un comportamiento muy lineal con respecto
a las variables de control.
Los flujos de potencia reactiva a través de los transformadores tienen un
comportamiento, también, muy lineal respecto a las variables de control.
Se parte de la información previa del estado de la red mediante la obtención de
matrices de sensibilidades de la red que relacionan las actuaciones sobre las
variables de control con la respuesta que se obtiene de ellas en las variables
dependientes.
En trabajos realizados [2], [3] se estudia el error que se comete al considerar la
linealización entre las variables dependientes y las variables de control en torno a un punto de
funcionamiento. Este hecho permite utilizar la matriz de sensibilidades a la hora de realizar
una estimación de las tensiones cuando se realiza una actuación sobre algún control. El error
que se comete es relativamente pequeño en el caso de las tensiones. Sin embargo esta
aproximación puede llegar a no ser tan aceptable en el caso de la potencia reactiva, tanto para

Interfaz Gráfica para el control de tensiones y potencia reactiva en los transformadores frontera
Trasporte-Distribución
Pág. 39
la generada por los generadores como para los flujos de potencia, ya que presentan tendencias
cuadráticas. La suposición de linealidad es válida entorno al punto de funcionamiento,
incurriendo en mayor error a medida que la operación se aleje de este punto. Tal y como se
referencia en [2]. Entonces existe la posibilidad de que al corregir una tensión se estime una
situación aceptable para las potencias reactivas, cuando realmente se encuentran fuera de
límites o que aparezca una nueva violación. Este hecho se corrige introduciendo un factor de
seguridad en la actuación, que la restringe en cantidad, para evitar estos posibles problemas de
exactitud. La única consecuencia de utilizar esta propuesta es tener que realizar una actuación
correctora en dos pasos, en torno a dos puntos de funcionamiento donde las sensibilidades
cumplen las expectativas de estimación, en base a la linealización de las relaciones entre
variables dependientes y controles.
Tal y como se introdujo en el capítulo anterior, el método empleado tiene como novedad la
gestión de los flujos de potencia reactiva a través de los transformadores [2] y siguiendo la
filosofía del control de tensiones, ésta se apoya en la linealidad de los flujos de potencia
reactiva con los controles.
La matriz de sensibilidades es un elemento que se calculará en cada momento que se realice
una actuación del sistema, de ahí su importancia.
4.3 CÁLCULO DE LAS ACTUACIONES
Una vez que se tienen las matrices de sensibilidad correspondientes a cada etapa de
control es necesario conocer las actuaciones que se pueden llevar acabo teniendo en cuenta las
restricciones a las que están sometidas las variables de control.
Los valores que pueden tomar las actuaciones están limitados, es por ello que habrá que
calcular la actuación máxima permitida para cada variable de control, que garantice un estado
admisible, referido a las magnitudes que se quieren llevar dentro de límites.

Interfaz Gráfica para el control de tensiones y potencia reactiva en los transformadores frontera
Trasporte-Distribución
Pág. 40
En un dispositivo se puede actuar de dos formas, o en dos sentidos, el de aumentar su valor
actual o disminuirlo. Entonces habrá que definir dos incrementos máximos posibles del vector
de las variables de control u, para una situación dada del sistema.
{ }max max, , ,minu up u Yi upΔ = Δ donde max
, ,u Yi upΔ es el incremento máximo que se permite a
la variable u en la dirección de aumento con respecto a la variable Yi. En la que
Yi es la variable dependiente que se pretende llevar dentro de límites actuando
sobre las variables de control.
{ }max max, , ,minu down u Yi downΔ = Δ donde max
, ,u Yi downΔ es el incremento máximo que se
permite a la variable u en la dirección de disminución con respecto a la
variable Yi, variable que se pretende llevar dentro de límites.
Por esto para la propia variable de control se tendrá lo siguiente:
max
max , ,
maxmin , ,
actual u u up
actual u u down
u u
u u
= + Δ
= − Δ
(4-29)
Para el resto de variables de control se tendrá lo siguiente:
max minmax max
, , , , ,, ,
min maxmax max
, , , , ,, ,
maxmax
, , ,,
0 ....... ...
0 ....... ...
0 ....... ...
i i i iu Vi u Vi up u Vi down
u Vi u Vi
i i i iu Vi u Vi up u Vi down
u Vi u Vi
i iu u Qi u Qi up
u u Qi
V V V VS yS S
V V V VS yS S
Q QL yL
⎧ − − +> ⇒ Δ = Δ =⎪
⎪⎨
− − +⎪ < ⇒ Δ = Δ =⎪⎩
−∇ > ⇒ Δ = Δ
∇
minmax
, ,,
min maxmax max
, , , , ,, ,
0 ....... ...
i iu Qi down
u u Qi
i i i iu u Qi u Qi up u Qi down
u u Qi u u Qi
Q QL
Q Q Q QL yL L
⎧ − +=⎪ ∇⎪
⎨− − +⎪∇ < ⇒ Δ = Δ =⎪ ∇ ∇⎩
(4-30)

Interfaz Gráfica para el control de tensiones y potencia reactiva en los transformadores frontera
Trasporte-Distribución
Pág. 41
Los incrementos máximos definidos serán positivos cuando las variables sobre la que se
quiere influir esta dentro de límites, en el caso que la variable se encuentre fuera de límites el
valor del incremento máximo será negativo. Para evitar que se empeore la variable que esta
fuera de límites, el incremento máximo se igualará a cero.
El mínimo Δumax, para cada una de las direcciones, determinará la actuación máxima que se
podrá realizar sobre una variable de control para lograr corregir la violación de límites de una
tensión en los nudos o un flujo de potencia de reactiva, de forma también que se garantice que
ninguna otra variable dependiente se llevara a una situación fuera de límites.
Se necesita conocer cuál es la consecuencia máxima sobre las variables a corregir cuando
sobre las variables de control se procede a una actuación máxima. Los coeficientes de
eficiencia (CE) serán unos coeficientes que indicarán cómo afectan las actuaciones sobre las
variables dependientes. Este hecho permite comparar las distintas variables de control en una
misma base, el efecto provocado en la variable dependiente. Por tanto los coeficientes de
eficiencia van a permitir realizar una elección más apropiada de las variables de control.
Al existir dos situaciones diferenciadas en el método para corregir el estado de la red,
corrección de tensiones de nudos primero y corrección de flujos de reactiva en segundo lugar,
se definen dos coeficientes de eficiencia, uno para las tensiones, CEu,Vi, y otro para los flujos
de potencia reactiva a través de los transformadores, CEu,Qi.
max
, ,
max, ,
·
·u Vi u Vi
u Qi u u Qi
CE S u
CE L u
⎧ = Δ⎪⎨
= ∇ Δ⎪⎩
(4-31)
Donde Δumax es el incremento máximo de la variable de control en el sentido de aumento o
disminución, según lo que requiera la actuación.

Interfaz Gráfica para el control de tensiones y potencia reactiva en los transformadores frontera
Trasporte-Distribución
Pág. 42
Para poder optimizar el gasto computacional en el algoritmo que aquí se trata se irán
corrigiendo secuencialmente el peor de los estados que esté presente en cada corrección del
sistema. Por ello se elegirá en primer lugar, para el caso del control de tensiones, la tensión
que más alejada este de los límites, tanto inferior como superior.
Esta estrategia asegura no poder empeorar ninguna otra variable y al tratar de mejorar la más
alejada se tendrá un estado de tensiones y flujos de reactiva igual o mejor que el estado previo
a la aplicación de la actuación. La tensión que se elegirá será la mayor en valor absoluto,
entonces:
min max
max max
min min
000
si V V VV V V si V V
V V si V V
⎧= < <⎪
Δ = − > > ⎨⎪ − < < ⎩ (4-32)
Figura 4-12 Tendencia de corrección de las tensiones
Análogamente se determina con los flujos de potencia reactiva a través de los transformadores
en la fase de control de flujos.
El algoritmo de cálculo de correcciones no va a tener en cuenta todas las variables de control
especificadas, esto sería demasiado pesado. Se hace una selección entre todas ellas y se eligen
las tres variables con mejores condiciones para ser tratadas. El criterio de selección es
mediante los coeficientes de eficiencia.
Se calculan los coeficientes de eficiencia referente a la variable dependiente a la que se
pretende corregir su estado para cada variable de control preseleccionada y se toman como
variables de control las tres variables con el mayor coeficiente de eficiencia en valor absoluto.

Interfaz Gráfica para el control de tensiones y potencia reactiva en los transformadores frontera
Trasporte-Distribución
Pág. 43
El siguiente paso que se toma es determinar las actuaciones a realizar en las 3 variables de
control. El resultado no será una combinación de las tres actuaciones determinadas, sino una
consecuencia de actuar secuencialmente sobre cada una de las variables. Es decir, se actuara
sobre una de ellas y se re calculará el estado del sistema, ya que las matrices de sensibilidades
y los incrementos máximos permitidos dependen del estado en el que se encuentra la red de
trabajo.
Para la fase de control de tensiones se tendrá lo siguiente:
1 2 3, 1 , 2 , 3· · ·i i ii u V u V u VV S u S u S uΔ = Δ + Δ + Δ (4-33)
Y el proceso para calcular los incrementos respectivos se detalla a continuación:
- Primero se calcula Δu1, teniendo en cuenta que sobre las otras dos variables también
se va a actuar.
1 2 3
1 2 3
, 1 , 2 , 3
31 2
, , ,
· · ·i i i
i i i
i u V u V u V
u V u V u V
V S u S u S u
uu uCE CE CE
Δ = Δ + Δ + Δ
ΔΔ Δ= =
(4-34)
Se comprueba que la actuación de la variable 1 es admisible, es decir, no supera el valor de la
actuación máxima previamente calculado en el mismo sentido de la actuación. En el caso en
el que se tenga un incremento mayor al máximo permitido, se iguala la actuación a este valor
máximo, y esta será la actuación que se acometerá en el dispositivo de control.
Calculado el incremento de la primera variable, se igualan las otras dos a cero, para así tener
sólo el efecto sobre el sistema de la primera variable.
Se reprograma el valor de la variable añadiéndole el incremento calculado y esto llevará a un
nuevo estado del sistema.
Mediante un reparto de cargas se procede al análisis de la nueva situación del sistema. Esta
nueva situación proporciona unos nuevos valores de las matrices de sensibilidades, tanto de S

Interfaz Gráfica para el control de tensiones y potencia reactiva en los transformadores frontera
Trasporte-Distribución
Pág. 44
como de u L∇ , y de los incrementos máximos en ambas direcciones, necesarias todas para
llevar a cabo otra actuación sobre el sistema.
Posteriormente se calcula el incremento correspondiente a la segunda variable de control
seleccionada por el programa para actuar sobre la red, teniendo en cuenta que se actuará sobre
una segunda variable (la tercera variable seleccionada inicialmente en el cálculo de los
incrementos) y que sobre la variable sobre la que se actuó en el paso previo no se actuará.
De igual manera que para la primera variable, se determina que valor es el aceptable y se re
calcula el estado del sistema.
Por último se toma la variable sobre la que aún no se ha actuado y se vuelve a aplicar el
mismo proceso.
Realizadas las tres actuaciones secuenciales anteriores, se comprueba la presencia de
variables con valores fuera de sus límites de control. En caso de encontrar alguna que exceda
de los límites preestablecidos, tanto inferior como superior, el algoritmo volverá a ejecutarse
desde el punto en el que se determinan las tres variables de control que se utilizarán para la
mejora del sistema hasta que se eliminen las situaciones anómalas o se lleguen a realizar un
número de ciclos predeterminado.
4.4 ANÁLISIS DEL SISTEMA DESPUÉS DE TRES ACTUACIONES
SECUENCIALES.
Realizadas las tres actuaciones secuenciales anteriores, se comprueba la presencia de
tensiones con valores fuera de sus límites de control. En caso de encontrar alguna tensión que
exceda de los límites preestablecidos, tanto inferior como superior, el algoritmo volverá a
ejecutarse desde el punto en el que se determinan las tres variables de control que se utilizarán
para la mejora del sistema.
El bucle de búsqueda de mejora del perfil de tensiones (Figura 4-13) de la red finalizará en el
momento en el que no se detecten violaciones de tensión o se realicen un número ciclos
predefinido por el operador del algoritmo.

Interfaz Gráfica para el control de tensiones y potencia reactiva en los transformadores frontera
Trasporte-Distribución
Pág. 45
Figura 4-13 Bucle de búsqueda del perfil óptimo de tensiones
4.5 CORRECCIÓN DE LOS FLUJOS DE POTENCIA REACTIVA CIRCULANDO
POR LOS TRANSFORMADORES.
El bloque referido al control de flujos de potencia reactiva, tiene la misión de localizar
flujos de potencia reactiva que superen los límites requeridos en los transformadores. En el
caso de que se encuentren unos flujos no permitidos el módulo intentará llevar las potencias
reactivas a valores permisibles y en caso de no lograrlo, deberá mejorar la circulación de estos
flujos a través de la red. De esta manera se podrá tener una reserva adecuada de reactiva y
minimizar perdidas en el transporte.

Interfaz Gráfica para el control de tensiones y potencia reactiva en los transformadores frontera
Trasporte-Distribución
Pág. 46
El funcionamiento del módulo es equivalente al módulo referido al control de tensiones, con
la diferencia de que la matriz de sensibilidad será u L∇ , y se requerirá de los coeficientes de
eficiencia en función de los flujos de reactiva.
Se vuelve a repetir el bucle “corrección de flujos” hasta que no se encuentren violaciones de
flujos de potencia reactiva en el sistema o se llegue a un número de ciclos preestablecido por
el operador.
4.6 RESULTADO FINAL.
Sobre el sistema se ha inducido unas reprogramaciones en las consignas de las
variables de control, primero mediante un control de tensiones en el que se pretende eliminar
o mejorar las tensiones en los nudos cuyos valores no cumplan unos requisitos y segundo
mediante un control de los flujos de potencia reactiva que circula a través de las líneas.
Todas las acciones correctoras conjuntas deben conducir a la red a una situación en la que
todos los valores que no sean permisibles se encuentren después dentro de los límites de
control y calidad exigidos. Esto será siempre y cuando se pueda tener la capacidad suficiente
para garantizar los criterios de calidad y poder corregir todos los valores de las variables. En
caso de no conseguir el esperado fin, si que se deberá conseguir una mejora del estado.


















