3. El convertidor en fuente de tensión como filtro...
45
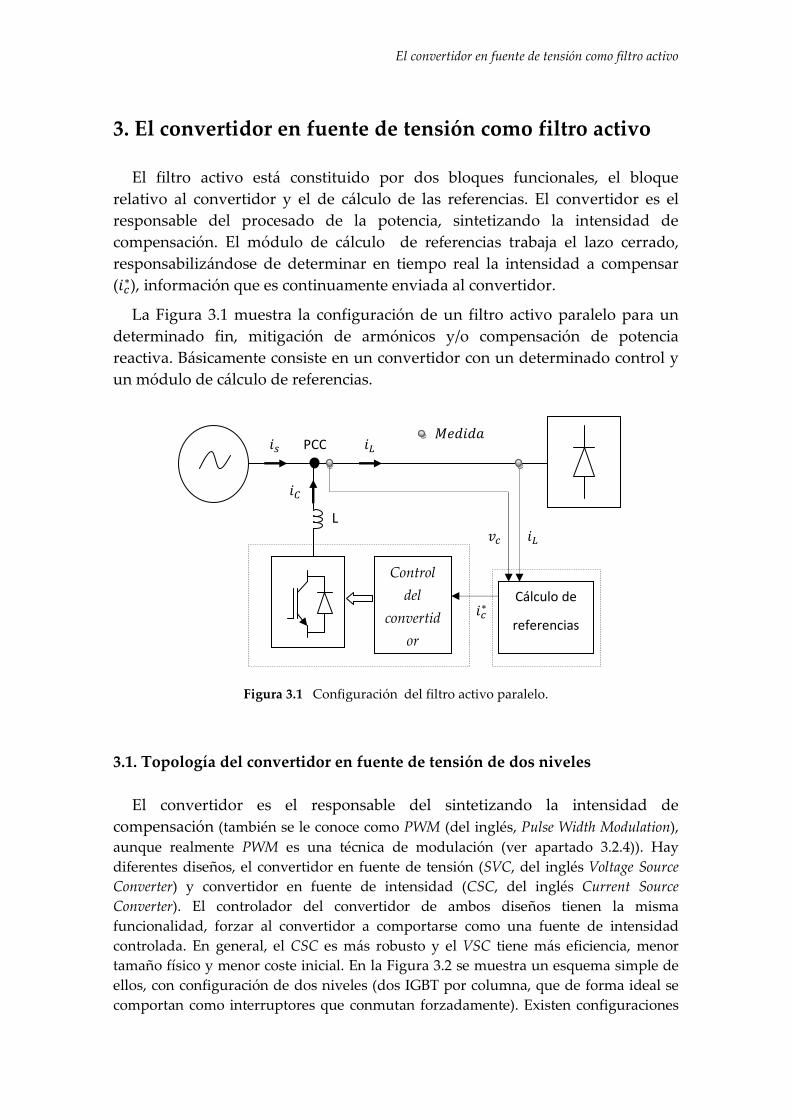
El convertidor en fuente de tensión como filtro activo 3. El convertidor en fuente de tensión como filtro activo El filtro activo está constituido por dos bloques funcionales, el bloque relativo al convertidor y el de cálculo de las referencias. El convertidor es el responsable del procesado de la potencia, sintetizando la intensidad de compensación. El módulo de cálculo de referencias trabaja el lazo cerrado, responsabilizándose de determinar en tiempo real la intensidad a compensar ( ), información que es continuamente enviada al convertidor. La Figura 3.1 muestra la configuración de un filtro activo paralelo para un determinado fin, mitigación de armónicos y/o compensación de potencia reactiva. Básicamente consiste en un convertidor con un determinado control y un módulo de cálculo de referencias. Figura 3.1 Configuración del filtro activo paralelo. 3.1. Topología del convertidor en fuente de tensión de dos niveles El convertidor es el responsable del sintetizando la intensidad de compensación (también se le conoce como PWM (del inglés, Pulse Width Modulation), aunque realmente PWM es una técnica de modulación (ver apartado 3.2.4)). Hay diferentes diseños, el convertidor en fuente de tensión (SVC, del inglés Voltage Source Converter) y convertidor en fuente de intensidad (CSC, del inglés Current Source Converter). El controlador del convertidor de ambos diseños tienen la misma funcionalidad, forzar al convertidor a comportarse como una fuente de intensidad controlada. En general, el CSC es más robusto y el VSC tiene más eficiencia, menor tamaño físico y menor coste inicial. En la Figura 3.2 se muestra un esquema simple de ellos, con configuración de dos niveles (dos IGBT por columna, que de forma ideal se comportan como interruptores que conmutan forzadamente). Existen configuraciones PCC L Cálculo de referencias Control del convertid or
Transcript of 3. El convertidor en fuente de tensión como filtro...
El convertidor en fuente de tensión como filtro activo
3. El convertidor en fuente de tensión como filtro activo
El filtro activo está constituido por dos bloques funcionales, el bloque
relativo al convertidor y el de cálculo de las referencias. El convertidor es el
responsable del procesado de la potencia, sintetizando la intensidad de
compensación. El módulo de cálculo de referencias trabaja el lazo cerrado,
responsabilizándose de determinar en tiempo real la intensidad a compensar
(���), información que es continuamente enviada al convertidor.
La Figura 3.1 muestra la configuración de un filtro activo paralelo para un
determinado fin, mitigación de armónicos y/o compensación de potencia
reactiva. Básicamente consiste en un convertidor con un determinado control y
un módulo de cálculo de referencias.
Figura 3.1 Configuración del filtro activo paralelo.
3.1. Topología del convertidor en fuente de tensión de dos niveles
El convertidor es el responsable del sintetizando la intensidad de
compensación (también se le conoce como PWM (del inglés, Pulse Width Modulation),
aunque realmente PWM es una técnica de modulación (ver apartado 3.2.4)). Hay
diferentes diseños, el convertidor en fuente de tensión (SVC, del inglés Voltage Source
Converter) y convertidor en fuente de intensidad (CSC, del inglés Current Source
Converter). El controlador del convertidor de ambos diseños tienen la misma
funcionalidad, forzar al convertidor a comportarse como una fuente de intensidad
controlada. En general, el CSC es más robusto y el VSC tiene más eficiencia, menor
tamaño físico y menor coste inicial. En la Figura 3.2 se muestra un esquema simple de
ellos, con configuración de dos niveles (dos IGBT por columna, que de forma ideal se
comportan como interruptores que conmutan forzadamente). Existen configuraciones
������
PCC � �
��
L
� ��
Cálculo de
referencias
Control
del
convertid
or
���

El convertidor en fuente de tensión como filtro activo
de tres o más niveles. Estas pueden lograr mayores tensiones y potencias que en el caso
de de un de dos niveles, incluso las formas de ondas obtenidas pueden ser de mayor
calidad. Sin embargo, hoy día con el desarrollo de los semiconductores cada vez se
están logrando mejores resultados con configuraciones más simples.
Figura 3.2a VSC dos niveles . Figura 3.2b CSC de dos niveles.
Actualmente el módulo de IGBT (IGBT + diodo) con mayor disponibilidad de
mercado y mejor diseño corresponde a los utilizados en el VSC, debido a que el diodo
está conectado en anti-paralelo con el IGBT, eximiendo a este último de su bloqueo por
sí mismo. Esto conlleva más flexibilidad en el diseño del dicho dispositivo. De hecho la
mayoría de los filtros activos utilizados en multitud de aplicaciones adoptan un equipo
con configuración de VSC.
El convertidor no suministra potencia neta al sistema eléctrico. Sólo tiene conectado
un elemento almacenador de energía, un condensador para topología VSC y una
bobina para CSC, ambos encargados de suministrar la potencia de compensación. La
razón es que el APF tiene como principal función comportarse como un compensador
de intensidad; en otras palabras, el promedio de energía intercambiada entre el filtro
activo y el sistema de potencia debe ser cero. Ello no significa que por el no circule
potencia. De hecho circulará aproximadamente entre un 5 y 20% de la potencia de la
carga.
El filtro activo debe ser diseñado para mantener constante la tensión DC del
condensador en el caso de un VSC, o la corriente DC que circula a través de la bobina
del CSC. Además debe forzar al sistema eléctrico a suministrar las pérdidas que se
producen en el convertidor (pérdidas por conducción y pérdidas de conmutación,
siendo necesaria la refrigeración) y en la inductancia de acoplamiento (ambas
especificaciones son conseguidas mediante el control del convertidor, descrito en el
apartado 3.2.3).
Control PWM
���
���
���
��� ��� ���
����
���
Control PWM
���
�
�
�
� �
�
�
����
����
���
� ���
� ���
�
���
���
���
���
������

El convertidor en fuente de tensión como filtro activo
3.1.1. Modelo del VSC
En la Figura 3.3 se puede observar un esquema muy simple de un VSC de dos
niveles (IGBT �� y su complementario ��� � � � �, , �� .
Figura 3.3 Esquema de un APF paralelo con configuración VSC de dos niveles.
Se trabajará con modelos dinámicos de electrónica de potencia, utilizándose
el denominado modelo electromagnético promediado del elemento en cuestión.
Para la deducción del modelo un VSC de dos niveles se plantean las leyes de
Kirchhoff sobre el circuito anterior, considerando que los IGBTs pueden estar
encendidos o apagados de forma ideal (se comporta idealmente como un
interruptor).
3.1.1.1. Modelo de la parte alterna
El modelo es elaborado con intensidades de línea (la configuración en estrella
implica equivalencia con las de fase) y tensiones de fase, éstas últimas referidas
al punto común N; por lo tanto es un modelo equivalente en estrella. Se
considerará cada fase por separado, en la que se calculará la relación de
tensiones entre el punto N y M. Dado que el condensador actúa como una
fuente de tensión se tratará con referencia activa.
Se introduce la variable de conmutación �, que modela el propio estado de
los IBGTs, de tal manera que los interruptores superiores siempre están en un
estado de operación complementario al correspondiente inferior su propia
columna, evitándose así un posible indeseado cortocircuito. Por lo tanto el
conjunto de los 6 IGBTs sólo tienen 8 estados posibles (2�), ilustrados en la
Figura 3.4.
��
��
� �
� �
�
�
�
��������� ��
�� ��
�
�
���
�� ��
��� ��� ���
��
�
�
���
�� �� ��

El convertidor en fuente de tensión como filtro activo
1, �� �� � ! ��� �""
� � �1, �� �� �"" ! ��� �
Figura 3.4 Función de conmutación � (� � � �, , �).
La función de conmutación � será la variable entrada del convertidor,
siendo ésta discreta. El modelo por lo tanto resulta no lineal y de estructura
variable. Los controladores que se desarrollarán en este proyecto se basarán en
modelos dinámicos de ecuaciones diferenciales ordinarias, ODE (del inglés
Ordinary Differential Equations). Así que se debe obtener un modelo ODE a partir
del modelo de estructura variable. Esto se logra promediando el modelo
obtenido. Para ello se debe considerar que las conmutaciones, modeladas con la
variable �, ocurren de manera muy rápida, teóricamente a frecuencia infinita.
En este trabajo se considerará el modelo promediado como representativo del
problema, si la frecuencia de conmutación es tal que la corriente de salida
presenta un bajo rizado, al ser filtrada por el circuito RL de acoplamiento,
comprendidos por la resistencia R y la inductancia L mostradas en la Figura 3.3.
Independientemente de los estados de conmutación de los IBGTs, las
relaciones de tensión entre los terminales del VSC del lado de alterna y el punto
común N se pueden expresar como sigue:
��� � � #��#$ � ��� � ��� %3.1�
��� � � #��#$ � ��� � ��� %3.2�
��� � � #��#$ � ��� � ��� %3.3�
Sin embargo, las tensiones ��� (� � � �, , �� sí dependen del estado de
conmutación del convertidor, por ello se dice que es un modelo de estructura
variable. Se diferenciará entre los estados complementarios � � 1 y � � �1.

El convertidor en fuente de tensión como filtro activo
◦ () � *:
Figura 3.5 Esquema del VSC para �� � ! ��� �"". � � � �, , �.
Resultando las expresiones (3.4)-(3.6) al plantear las relaciones de tensiones
entre los puntos M y N de la Figura 3.5 para cada fase k:
��� � ��� � ��� %3.4�
��� � ��� � ��� %3.5�
��� � ��� � ��� %3.6�
Donde �� � �� � ��� y �� � �� � ��� � k � a, b, c.
◦ () � �*:
Figura 3.6: Esquema VSC cuando �� �"" ! ��� � . � � � �, , �.
Las nuevas relaciones de tensiones das lugar a las expresiones (3.7)-(3.9).
��� � ��� %3.7�
��� � ��� %3.8�
��� � ��� %3.9�
A continuación se expresa el modelo de estructura variable, dado por las
expresiones (3.4)-(3.6) y (3.7)-(3.9), mediante una ecuación compacta por fase
que contemple los dos estados posibles de la variable binaria modeladora del
estado de conmutación � � 6�1,17:
��� � 1 � �2 ��� � ��� %3.10�
�� ��
� � �
��� ��
�
�
���
��
��
��
��
� � �
��� �� ��
���

El convertidor en fuente de tensión como filtro activo
��� � 1 � �2 ��� � ��� %3.11�
��� � 1 � �2 ��� � ��� %3.12�
Considerando que el sistema trifásico está equilibrado (tensiones de igual
módulo y desfasada 120° e impedancias iguales por fase), se cumple la
siguiente expresión:
��� � ��� � ��� � 0 %3.13�
La identidad anterior permite que a través de la suma las ecuaciones (3.10)-
(3.12) se determine el valor de ��� exclusivamente en función de la tensión del
condensador y la variable binaria modeladora del estado de los IGBTs, �:
��� � 9 � � � � �6 � 12: · ��� %3.14�
Llegado a este punto se considera la siguiente hipótesis. Debido a la propia
naturaleza del sistema eléctrico a estar equilibrado, se fuerza el cumplimiento
de que la suma de los valores promedios de � sea nula. Para aplicar dicha
hipótesis es necesario promediar los respectivos �:
Figura 3.7 Promediado <� de la función de conmutación � . � � � �, , �.
El promediado <� de la función de conmutación no es más que la media o
promedio de la función � en el intervalo o periodo C0, DE, expresión (3.15). Se
recuerda que el promediado representa adecuadamente los cambios de estado
sólo si éstos se producen a elevada frecuencia:
� FGHIJK <�
<� � LM N �#$MO %3.15�
<� P [ -1 , 1 ]
<�
�
Q
D
$
1
�1

El convertidor en fuente de tensión como filtro activo
Luego, la ecuación (3.14) se reescribe como:
��� 9<� � <� � <�6 � 12: · ��� %3.16�
Introduciendo la expresión (3.13) (consecuencia de la hipótesis de sistema
eléctrico equilibrado) en el resultado (3.16), se obtiene el valor de ��� en
función de la tensión del condensador:
��� � � 12 ��� %3.17�
Por lo tanto las ecuaciones (3.10)-(3.12) que expresan el modelo de estructura
variable pueden ser reescritas al emplazar ��� por el resultado (3.17):
��� � <����2 %3.18�
��� � <����2 %3.19�
��� � <����2 %3.20�
Finalmente, igualando las ecuaciones (3.1)-(3.3) y (3.18)-(3.20) se obtiene el
modelo promediado del VSC, donde <� P [-1,1] %� k � a, b, c� gobierna el
comportamiento del convertidor:
� �RS�T � USVWXY ���� � ��� %3.21�
� �RZ�T � UZVWXY ���� � ��� %3.22�
� �RX�T � UXVWXY ���� � ��� %3.23�
El modelo promediado del VSC expresado mediante las ecuaciones (3.21)-
(3.23) no proporciona una entrada directa para el PWM (técnica que permite
invertir un modelo promediado en un modelo de estructura variable,
desarrollada en el apartado 3.2.4.). No se puede tomar <� como entrada por el
hecho de que <� P [-1,1]. La entrada necesaria del PWM o convertidor es el ciclo
de trabajo o Duty <�� , que por definición: <�� P [0,1] (ver apartado 3.2.4). El
desarrollo de la ecuación (3.15) proporciona una relación entre <� y <�� .
<� � 1D [ �#$ � 1DM
O \[ 1#$ � [ �1#$M]
]O ^ � 2 QD � 1 � 2<�� � 1
<� � 2<�� � 1 %3.24�
Introduciendo la identidad (3.24) en las expresiones (3.21)-(3.23) resulta un
modelo en el que la principal ventaja es la obtención directa del ciclo de trabajo:

El convertidor en fuente de tensión como filtro activo
� �RS�T � %<�� � 1 2⁄ ���� ���� � ��� %3.25�
� �RZ�T � %<�� � 1 2⁄ ���� ���� � ��� %3.26�
� �RX�T � %<�� � 1 2⁄ ���� ���� � ��� %3.27�
EL modelo expresado por las ecuaciones (3.25-3.27) podría haberse obtenido
directamente si el modelo de estructura variable compacto (3.10)-(3.12) se
hubiese expresado a través de �� , una variable binaria diferente que también
modela el cambio de estado de los IGBTs, pero que al promediarse proporciona
directamente el ciclo de trabajo.
1, �� �� � ! ��� �""
�� � 0, �� �� �"" ! ��� �
Figura 3.8 Función de conmutación �� . � � � �, , �. Por definición de ciclo de trabajo, éste corresponde al promedio <�� de la
variable binaria �� :
<�� � 1D [ `#$ � 1
DD
0 [ 1#$ � QD
Q0 %3.28�
<�� P [0 ,1]
Figura 3.9 Duty <�� � k � a, b, c.
No obstante se utilizará el modelo con <� con objeto de simplificar los
cálculos para obtener el modelo en ejes dq.
<��
Q D
$
1
0
��
El convertidor en fuente de tensión como filtro activo
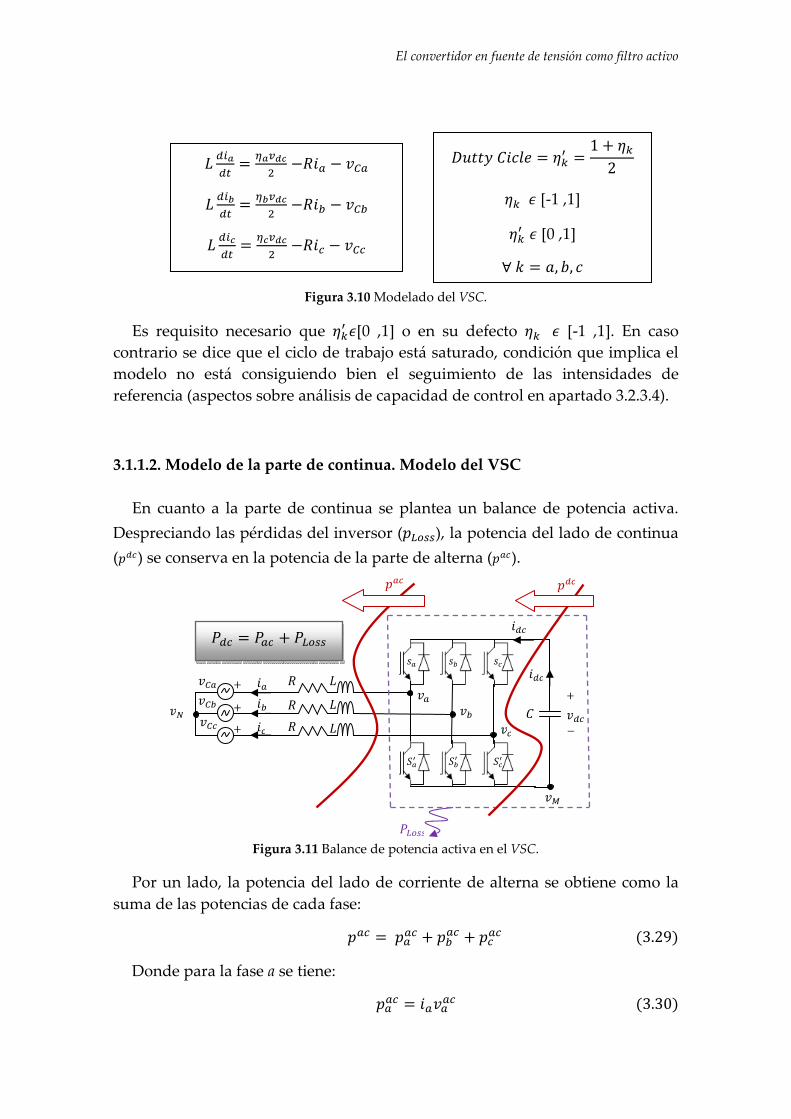
Figura 3.10 Modelado del VSC.
Es requisito necesario que <�� P[0 ,1] o en su defecto <� P [-1 ,1]. En caso
contrario se dice que el ciclo de trabajo está saturado, condición que implica el
modelo no está consiguiendo bien el seguimiento de las intensidades de
referencia (aspectos sobre análisis de capacidad de control en apartado 3.2.3.4).
3.1.1.2. Modelo de la parte de continua. Modelo del VSC
En cuanto a la parte de continua se plantea un balance de potencia activa.
Despreciando las pérdidas del inversor (abcdd), la potencia del lado de continua
(a��) se conserva en la potencia de la parte de alterna (a��).
Figura 3.11 Balance de potencia activa en el VSC.
Por un lado, la potencia del lado de corriente de alterna se obtiene como la
suma de las potencias de cada fase:
a�� � a��� � a��� � a��� %3.29�
Donde para la fase a se tiene:
a��� � ������ %3.30�
� �RS�T � USVWXY ���� � ���
� �RZ�T � UZVWXY ���� � ���
� �RX�T � UXVWXY ���� � ���
ef$$! ��gh � <�� � 1 � <�2
� � � �, , �
<� P [-1 ,1]
<�� P [0 ,1]
��
��
� �
� �
�
�
�
��������� ��
�� ��
�
�
���
�� ��
��� ��� ���
��
�
�
�� �� ��
���
���
ibcdd
a��
a��
i�� � i�� � ibcdd

El convertidor en fuente de tensión como filtro activo
Siendo ���� la tensión entre el punto medio de la columna de IGBTs relativa a
la fase en cuestión y el punto N, la cual viene dada por la siguiente expresión:
���� � ��� � � #��#$ � ��� � <����2 %3.31�
Así la potencia en el lado alterna para la fase a puede expresarse como:
a��� � �� <����2 %3.32�
Análogamente para las otras dos fases. De esta forma la potencia en el lado
de alterna viene dada por la suma las potencias de cada fase:
a�� � a��� � a��� � a��� � ���2 %��<� � ��<� � ��<�� %3.33�
En el lado de corriente continua, la potencia se puede escribir en función de
las variables de continua:
a�� � ��� ��� %3.34�
Donde:
��� � #���#$ %3.35�
Por tanto la potencia en el lado de continua se puede expresar de la siguiente
forma:
a�� � ��� 9 #���#$ : %3.36�
Si se considera que no existen pérdidas en los IGBTs, la potencia que
suministra el condensador fluye íntegramente a la parte de alterna. Así se tiene
que ambas potencias planteadas anteriormente son equivalentes:
a�� � a�� %3.37�
Relación que al ser reemplazada según las expresiones (3.33) y (3.36)
obtenidas en anteriores desarrollos proporciona la relación siguiente:
��� 9 #���#$ : � ���2 %��<� � ��<� � ��<�� %3.38�
De modo que queda determinada la ecuación diferencial que modela la
dinámica del bus continua:
#���#$ � 12 %��<� � ��<� � ��<�� � 0 %3.39�

El convertidor en fuente de tensión como filtro activo
Finalmente, el modelado del VSC queda gobernado por cuatro ecuaciones
diferenciales ordinarias de primer orden no lineales, las cuales pueden
expresarse de la forma jk � `%j, f�: #��#$ � 1� l<����2 � ��� � ���m %3.40�
#��#$ � 1� l<����2 � ��� � ���m %3.41�
#��#$ � 1� l<����2 � ��� � ���m %3.42�
#���#$ � 1 n 12 %��<� � ��<� � ��<��o %3.43�
Es un sistema no lineal pues no cumple el principio de superposición.
Técnicamente el principio de superposición afirma que cuando las ecuaciones
que rigen el comportamiento de un problema físico son no lineales, entonces el
resultado de la solución de un problema asociado a un fenómeno, cuando están
presente un conjunto de entradas A y B, no puede obtenerse como la suma de
los efectos de A y B. Matemáticamente, el sistema se puede expresar
reducidamente como:
%���� � � `%<��� �
Dado un conjunto de entradas A y B:
p � �<L���y q � <Y���
Donde a y b son números reales. Si el sistema es no lineal se cumple que:
`%�<L��� � <Y���� r �`%<L���� � `%<Y����
3.1.1.3. Modelo dq del VSC
El modelo anteriormente obtenido está planteado en valores de fase
instantáneos. En el caso de un sistema trifásico de alterna las variables de dicho
modelo varían sinusoidalmente en el tiempo. Esto dificulta el desarrollo de
estrategias de control basadas en el modelo, donde se prefieren valores
constantes en estado estacionario (sin quitar la variación durante los
transitorios a controlar). Es más sencillo desarrollar un controlador que debe de
conseguir seguir una referencia constante que una variación sinusoidal. No
obstante por especificación del presente trabajo, los armónicos de distintas
frecuencias provocarán variables no constantes. Pero al estar en coordenadas dq
sí serán menos variables en el tiempo, ya que se elimina la variación de

El convertidor en fuente de tensión como filtro activo
armónico de frecuencia fundamental, que corresponde en general al de mayor
valor eficaz. Dicha trasformación se consigue aplicando la transformada de
Park ( s ) a las expresiones (3.40)-(3.43). Antes se reagrupará matricialmente las
magnitudes del problema con objeto de simplificar los posteriores cálculos:
t��� � u������v w��� � u<�<�<�
v x���� � u���������v
Y las siguientes matrices constantes:
y � u� 0 00 � 00 0 �v z � u� 0 00 � 00 0 �v
Por lo tanto las ecuaciones dinámicas del sistema se pueden compactar:
�RS�T � Lb lUSVWXY � ��� � ���m
�RZ�T � Lb lUZVWXY � ��� � ���m z �tSZX�T � w��� VWXY � yt��� � x����
�RX�T � Lb lUXVWXY � ��� � ���m
�VWX�T � L� { LY %��<� � ��<� � ��<��| �VWX�T �
LY w���t���M
Quedando el conjunto completo como:
z #t���#$ � w��� ���2 � yt��� � x���� %3.44�
�VWX�T � LY w���t���M %3.45�
La transformada de Park (T) permite relacionar las magnitudes expresadas
en ejes dq y las trifásicas:
t��� � s}Lt�~ %3.46�
w��� � s}Lw�~ %3.47�
x���� � s}Lx��~ %3.48�

El convertidor en fuente de tensión como filtro activo
Introduciendo éstas últimas en las expresiones matriciales (3.44) y (3.45) se
obtienen las siguientes expresiones:
z #%s}Lt�~�#$ � %s}Lw�~� ���2 � y%s}Lt�~� � s}Lx��~ %3.49�
�VWX�T � %s}Lw�~�%s}Lt�~�M %3.50�
Desarrollando la derivada del producto y multiplicando por T la ecuación
(3.49):
sz ��%s����T t�~ � szs}L �tW��T � ss}Lw�~ VWXY � sys}Lt�~ � ss}Lx��~ %3.51�
Sacando factor comun L y R respectivamente de L y R, se quedan como el
producto de una constante y la matriz identidad I:
�s� ��s����T t�~ � �s�s}L �tW��T � ss}Lw�~ VWXY � �s�s}Lt�~ � ss}Lx��~ %3.52�
Simplificando:
�s ��s����T t�~ � � �tW��T � w�~ VWXY � �t�~ � x��~ %3.53�
Donde:
s #%s}L�#$ � l0 �11 0 m %3.54�
Debido a los términos no diagonales no nulos de la matriz anterior queda
patente el acoplamiento del sistema de ecuaciones. Desglosando en ambas
compotentes queda:
�RW�T � Lb %UWVWXY � ��� �L��~ � ���� %3.55�
�R��T � Lb %U�VWXY � ��~ �L��� � ��~� %3.56�
En cuanto a la ecuación gobernante de la dinámica del bus de contínua, si
dicha expresión (3.50) es multiplicada por la transformada de Park T y se opera
debidamente se tiene:
�VWX�T � LY w�~t�~M %3.57�
Efectuando el producto entre los vectores w�~! t�~M:
�VWX�T � L� {L
Y %<��� � <~�~�| %3.58�

El convertidor en fuente de tensión como filtro activo
En resumen, el modelo promediado en coordenadas dq que representa la
dinámica de un VSC queda expresado por las siguientes ecuaciones
diferenciales (3.59)-(3.61):
�RW�T � L
b %UWVWXY � ��� � L��~ � ���� (3.59)
�R��T � Lb %U�VWXY � ��~ � L��� � ��~� %3.60�
�VWX�T � L� {L
Y %<��� � <~�~�| (3.61)
Figura 3.12 Modelo del VSC en coordenadas dq.
Simulaciones y modelos a escala
Todo modelo que se plantee debe ser validado. En este punto se suele
plantear una discusión entre los que trabajan con modelos experimentales a
escala y los que optan por utilizar sólo simulaciones. Determinar cuál de los dos
métodos se acerca más a la realidad no es fácil, y hasta puede resultar una tarea
inútil. Lo que sí es cierto es que ninguno de los dos podrá reproducir
exactamente la realidad. En el caso de los modelos a escala se suele recurrir a
grandes simplificaciones. La eficiencia de un modelo a escala por lo general es
mucho menor que la del sistema real porque se suelen realizar importantes
simplificaciones topológicas. Por otro lado, en un modelo simulado, se
mantiene el tamaño verdadero del sistema real y no es necesario realizar
simplificaciones topológicas, puesto que poner más o menos elementos no
encarece las simulaciones. Sin embargo, el hecho de pretender similar la
realidad con ecuaciones matemáticas puede dar resultados totalmente erróneos.
Por más que el modelo utilizado sea el más complejo y realista, siempre se
cometerán errores. Así, lo único que se puede afirmar es que la única verdad es
la realidad. Todas las demás intentos que se puedan plantear para lograr
reproducirla son sólo aproximaciones de la realidad. Por tal motivo, se propone
�RW�T � Lb %UWVWXY � ��� � L��~ � ����
�R��T � Lb %U�VWXY � ��~ � L��� � ��~�
�VWX�T � L� {L
Y %<��� � <~�~�|
ef$$! ��gh � <�� � 1 � <�2
� � � #, �
<� P [-1 ,1]
<�� P [0 ,1]

El convertidor en fuente de tensión como filtro activo
que todas las aproximaciones no sean consideradas como exclusivas, sino
complementarias.
En este trabajo se considera la reproducción de la realidad sólo por medio de
simulaciones. El modelo es implementado en SimPowerSystem/Matlab. En
estos programas comerciales se pueden simular los IGBTs. También se pueden
simular los transformadores, líneas, y otras dinámicas. Se trata de modelos
fuertemente no lineales, de estructura variable, con un rango de frecuencias y
constantes de tiempo muy amplias. Toda la industria de convertidores utiliza
algunos de estos programas o similares con fin de estudiar un prototipo que se
desee implementar físicamente a escala real. La aceptación de los mismos está
basada en la proximidad de los resultados obtenidos, a la realidad que
modelan.

El convertidor en fuente de tensión como filtro activo
3.2. Bloques funcionales de un filtro activo
3.2.1. Medida
Tanto el control del convertidor (encargado del seguimiento de las
intensidades de referencia) como el control del filtro activo (encargado de
calcular en tiempo real las señales o intensidades de referencia) están
fundamentados en algoritmos que requieren el conocimiento de magnitudes
trifásicas de tensiones e intensidades.
Las medidas necesitadas para la ejecución del seguimiento de las
intensidades de referencia son las intensidades trifásicas inyectadas por el
convertidor. Para el cálculo de las referencias en tiempo real se requieren las
tensiones simples de fase en el punto PCC y las intensidades de línea de la
carga. El filtro activo debe ser diseñado para mantener constante la tensión DC del
condensador en el caso de un VSC, o la corriente DC que circula a través de la bobina
en caso de topología CSC. Luego se requiere medir la tensión o la intensidad DC.
3.2.2. Cálculo de la señal de referencia
3.2.2.1. Cálculo de intensidades de referencia mediante Teoría pq
Una ventaja significativa del uso de la Teoría pq [1] en el diseño de controles
de filtros activos es la posibilidad de seleccionar independientemente la porción
de potencia real y/o imaginaria a ser compensada.
�������� ��� � + �
������ ���� � � � + ��
Potencia Potencia
promedia oscilatoria
La potencia real (p) representa el flujo total de energía por unidad de tiempo
en el circuito. El valor promedio de ésta es la potencia intercambiada en una
sola dirección. Las oscilaciones de potencia real contiene la energía por unidad
de tiempo que produce un promedio de valor cero, representando una cantidad
adicional de flujo de potencia en el sistema eléctrico sin contribución efectiva de
energía transferida entre la fuente y la carga.

El convertidor en fuente de tensión como filtro activo
El conjunto de la potencia imaginaria promedia y la potencia imaginaria
oscilatoria proporciona la magnitud de la potencia intercambiada entre fases sin
transferencia de energía entre la fuente y la carga. La componente oscilatoria
presenta un valor promedio.
Tanto las oscilaciones de potencia real como imaginaria están asociadas
exclusivamente al contenido armónico demandado por la carga. Anteriormente
se mencionó la ventaja selectiva del método, permitiendo eliminar las
componentes armónicas de la corriente mediante la compensación de ambas
partes oscilatorias y/o compensar potencia reactiva. De esta forma se consigue
una corriente sinusoidal desde el punto de vista de la red, y/o el mínimo valor
eficaz de la intensidad de la red que transporta la misma cantidad de potencia
activa hacia la carga con las mínimas pérdidas de transmisión, significando que
la corriente de la fuente está en fase con la tensión de ésta, es decir, que la
corriente y la tensión son proporcionales.
La Figura 3.13 describe mediante diagramas de bloques el procedimiento de
cálculo de las intensidades de referencia mediante la Teoría pq.
Figura 3.13 Diagrama general de cálculo de corrientes de referencias
por el método de la Teoría pq.
El módulo de cálculo de la potencia instantánea requiere la toma de medidas
de tensiones de fase en el punto PCC (�����) y de intensidades de línea de la
carga�����). A través de la Transformación de Clarke se expresan las magnitudes
medidas en referencia estacionaria, y con éstas últimas el valor de la potencia
instantánea real e imaginaria:
��
�
� p �
q ����
Cálculo de la
potencia
instantánea
Selección de
compensación
de potencia
Regulador de
tensión DC
Cálculo de
intensidades
de referencia
����
��� ���
���
�����
�����
��� ��� ���
��
��
��

El convertidor en fuente de tensión como filtro activo
Figura 3.14 Cálculo de la potencia real e imaginaria.
El siguiente bloque permite hacer uso de la selectividad (característica del
propio método) posibilitando la compensación de armónicos de corriente y/o el
factor de potencia. En caso de requerir ambas, la obtención de � se ejecutará,
en general, con un filtro paso bajo de frecuencia de corte entre 20 y 100 Hz, de
forma que proporcione el valor promedio , el cual es descontado a la potencia
real. Por lo tanto las potencias a compensar son �= � y �� = �.
Hay que tener en cuenta que la tensión del condensador del bus de continua
hay que mantenerla constante para el correcto funcionamiento del inversor.
Esta especificación de operación se traduce en forzar a la red a suministrar las
pérdidas (de conmutación y conducción de los IGBTs y de la inductancia de
acoplamiento de convertidor). Según el criterio de signos adoptado en el
modelo de VSC (Figura 3.11), desde el punto de vista del convertidor, éste debe
inyectar una potencia negativa en la red de valor absoluto ����.En el apartado
3.2.3.3 se analizará como calcular y controlar dicha potencia (o la corriente
asociada a ella). Finalmente, una vez decididas y obtenidas las potencias a
compensar se calculan las intensidades de referencia trifásica asociadas a ellas.
Figura 3.15 Selección de la potencia a compensar.
La referencia calculada depende de la tensión del punto PCC, de forma que si
está distorsionada, la referencia calculada es errónea. En este caso, sería
��
�
��
��
p = �!·! + �"·"
p = �"·! - �!·"
vαβ
T. Clarke
p
q
��
� � ���� �!�
�"�
Inversa de
T. Clarke
�����
#$��$ � % � 1v() � v*) +�! �"�" ��! , - $ � ./00 �$ 1
����
�����

El convertidor en fuente de tensión como filtro activo
necesaria la detección de la componente fundamental de secuencia positiva de
dicha tensión, con el fin de dibujar una corriente sinusoidal desde el punto de
vista del sistema. La Figura 3.16 muestra el diagrama de bloques del detector de
tensiones.
Figura 3.16 Diagrama general de cálculo de corrientes de referencias.
Método Teoría pq con detector de secuencia directa.
El detector de tensión es un dispositivo basado en la Teoría pq. Las tensiones
de fase ����� son transformadas a ejes estacionarios mediante la Transformación
de Clarke. Las tensiones resultantes son usadas junto con las intensidades !2 e "2 producidas por el PLL para calcular 2 y �2 (una parte importante del detector
de secuencia directa es el PLL (descrito en el apartado 3.2.2.4) que debe "ver"
sólo lo que ocurre a frecuencia fundamental). Se asume que las corrientes
auxiliares !2 e "2 son magnitudes derivadas sólo de la secuencia positiva de la
corriente a frecuencia fundamental. La amplitud de las corrientes auxiliares no
�����
�����2
#$��$ � % � 1�!) � �") +�! �"�" ��! , - 3 � ./00 � 1
PLL
p’ = �!·!2 + �"·"2
p’ = �"·!2 - �!·"2
sin(45 )= !2
cos(45) = - !2
2 Filtro
paso
bajo
Filtro
paso
bajo
q’ �6 6 Inversa de
T. Clarke
�!2
�"2
T. Clarke
�2

El convertidor en fuente de tensión como filtro activo
son importantes, se pueden elegir arbitrariamente, por simplicidad serán la
unidad. En otras palabras 2 y �2 no tienen significado físico. En caso de
necesitarse detector de la componente fundamental de secuencia positiva de la
tensión, las nuevas tensiones simples, que se necesitan para calcular la potencia
instantánea con objeto de calcular las intensidades de referencia, será �����2 .
3.2.2.2. Cálculo de intensidades de referencia mediante el método síncrono
(SRF)
La implementación del método SRF [2] se muestra en la Figura 3.17.
Figura 3.17 Diagrama general de cálculo de corrientes de referencias
por el método síncrono.
Las intensidades trifásicas ���� son medidas y transformadas a referencia
síncrona (referencia rotativa a frecuencia fundamental). Ello requiere conocer la
frecuencia o el ángulo eléctrico fundamental del sistema para todo instante de
tiempo. La técnica del PLL lo proporciona (apartado 3.2.2.4).
Un filtro paso alto (tipo Butterworth) de segundo orden con una frecuencia
de corte de 30 Hz actuando sobre las intensidades en referencia síncrona (7 e 8)
es suficiente para dejar pasar las componentes armónicas de de éstas, siendo
éstas las intensidades a compensar 7� � 8� . El último es expresar las
intensidades 7� � 8� en referencia trifásica, a través de la transformación inversa
de Park. Indicar que este método no permite compensar potencia reactiva.
Este método tiene independencia directa de la tensión del sistema, aunque
indirectamente sí, ya que depende del ángulo de la tensión a la hora de realizar
la transformación. Si el PLL detecta que la tensión está distorsionada, el método
errará en el cálculo de las intensidades de referencia, eso sí, menos que el
método pq.
8
7
θe
T. Park
Filtro paso
alto
Filtro paso
alto
����
7�
8�
Inversa de
T. Park
�����

El convertidor en fuente de tensión como filtro activo
3.2.2.3. Cálculo de intensidades de referencia mediante el método estacionario
(StatRF)
El método StatRF [3] consiste en utilizar un filtro paso alto directamente a las
intensidades medidas de la carga en coordenadas trifásicas, de forma que sólo
se deje pasar el contenido armónico. Es decir, permite pasar el conjunto de
intensidades a compensar. Este método propone el siguiente filtro paso alto
(obtenido al pasar un filtro paso alto en dominio dq (9 �9 � :�;⁄ ), a coordenadas
trifásicas):
=���9; �>???@9) � :�9 � :�:A√3 � :A)
9) � 2:�9 � :�) � :A)2:�:A√39) � 2:�9 � :�) � :A)� 2:�:A√39) � 2:�9 � :�) � :A)
9) � :�9 � :�:A√3 � :A)9) � 2:�9 � :�) � :A) E
FFFG
Donde:
- :A: frecuencia fundamental del sistema.
- :�: frecuencia de corte. De valor 3-15 dB. Cuanto mayor sea antes se
llegará al régimen permanente.
Podría haberse utilizado un filtro paso bajo. La implementación de este
método se muestra en la Figura 3.18. Sólo es necesario filtrar la fase a y b. La
fase c es la suma cambiada de signo de las dos anteriores. Este método no
permite compensar potencia reactiva.
Figura3.18 Diagrama general de cálculo de corrientes de referencias
por el método estacionario.
Las ventajas de este método son:
1. No depende de las tensiones del sistema.
2. No requiere el conocimiento del ángulo de las tensiones.
��� ��
��
=��
���

El convertidor en fuente de tensión como filtro activo
Grado de sensibilidad Cte. proporcional Cte. integral
Insensible 1.43 318
Poco sensible 2.85 1268
Muy sensible 28.5 126610
Tabla 3.1 Sensibilidad de percepción a la distorsión de tensión.
Indicar que el grado de sensibilidad insensible no lo es infinitamente, debe
de verse como muy poco sensible. Un PLL infinitamente insensible es
equivalente a integrar en el tiempo sólo la frecuencia angular fundamental de
las tensiones del sistema.
3.2.3. Seguimiento de corriente (control del filtro activo)
Los controladores del presente trabajo se diseñarán basándose en el modelo
promediado. Con este modelo se simulará la respuesta del controlador y el
sistema objeto del presente trabajo ante unas referencias y perturbaciones. Una
vez obtenida una respuesta satisfactoria se procedería a implementar el
controlador en un modelo mucho más realista realizado en PSCD o RTLAB y
Matlab/Simulink, tarea que excede del objetivo de dicho proyecto. En cualquier
caso (simulación o realidad), al realizar el PWM (técnica de modulación
analizada en apartado 3.2.4.), las señales medidas tienen una importante
cantidad de ruido que debe ser filtrado todo lo posible. Este ruido puede afectar
a la respuesta del controlador. Controles con ganancias elevadas tienen mejores
comportamientos, sin embargo se debe cuidar que los ruidos no sean
amplificados hasta el punto de obtenerse respuestas inadmisibles que incluso
pueden derivar en sistemas inestables.
En general, todos los sistemas electrónicos cuentan con ciertas entradas y
salidas, que normalmente suelen ser estados o funciones de los mismos. En el
caso presente, el VSC modelado con las expresiones (3.59)-(3.60) tiene por
entradas las variables �� , �� y ���. Las salidas que se desean controlar son las
intensidades en ejes síncronos �� e �� (se desea que las salidas sigan una
referencia).
Se presenta un problema debido a que se tienen un número de entradas
superior al de salidas. Para poder abordar dicho se supondrá que la tensión del
bus de continua es fija o es un parámetro poco variable. Una vez desarrolladas
las distintas estrategias de control de intensidades se analizará y discutirá la
inclusión de la tensión del bus de continua ��� como variable a controlar. Por
lo tanto, el sistema de ecuaciones que permite el control de las intensidades,
tomando la tensión del condensador como un parámetro, es el siguiente:

El convertidor en fuente de tensión como filtro activo
���� � 1� �����2 � ��� � ���� � ���� �3.77�
���� � 1� �����2 � ��� � ���� � ���� �3.78�
3.2.3.1. Control a lazo abierto
Mediante las entradas ��y ��Se desea controlar las corrientes �� e ��. El
primer control que se plantea determina las entradas necesarias para hacer que
las salidas sean las deseadas de manera algebraica. Para ello, se utilizan las
expresiones (3.59)-(3.60) del modelo obtenido y se agregan dos ecuaciones
algebraicas que proporcionen las restricciones para que las corrientes que se
obtengan sean las deseadas (��� e ���).
� ���� � ���2 � ��� � ���� � ��� �3.79�
� ���� � ���2 � ��� � ���� � ��� �3.80�
0 � �� � ��� �3.81� 0 � �� � ��� �3.82�
La solución de este sistema algebraico determina (en estado estacionario) las
entradas necesarias para lograr los valores de consigna o referencia. Para
solucionar el sistema anterior se puede utilizar un algoritmo numérico como el
de Newton-Raphson. Sin embargo, en este caso la solución es muy simple y se
plantea de manera simbólica como sigue:
�� � �� !"!�!# $%&!� $ '&(� $ )*!+!, (3.83)
�� � �- !"(�!# $%&(� . '&!� $ )*(/!, (3.84)
El control a lazo abierto es impracticable por diversos motivos descritos en el
apartado 3.2.3.2..

El convertidor en fuente de tensión como filtro activo
3.2.3.2. Control proporcional-integral
El control a lazo abierto tiene una importante desventaja, la de tener que
conocer exactamente el modelo a controlar. Cualquier diferencia entre el
modelo utilizado (con objeto de obtener las entradas necesarias para lograr un
determinado objetivo) y la realidad, causará que se cometa un error que pueda
ser inadmisible. Por tal motivo, lo más común en la industria es realimentar las
salidas para que el sistema de control pueda eliminar errores paramétricos o
rechazar perturbaciones inesperadas. Si bien el modelo tiene un fuerte
acoplamiento entre las entradas (��y ��) y las salidas a controlar (�� e ��), para
ciertos valores de de inductancias y resistencias, se puede encontrar cierta
independencia entre unas y otras. Cuando esto ocurre se podría plantear dos
sistemas del tipo una entrada y una salida, SISO (del inglés Single-Input-Simple-
Output). Luego, se puede utilizar un controlador del tipo proporcional-integral
por cada sistema y así comparar la salida con una referencia a conseguir. Se
definen dos nuevas variables, la diferencia entre los valores deseados para los
estados y los propios estados, no son más que los errores de seguimientos y
pueden expresarse como sigue: 0&� � ��� � �� �3.85� 0&� � ��� � �� �3.86�
Obteniendo de las expresiones (3.59)-(3.60), que son no lineales y están
acopladas, las entradas en función de los parámetros y las salidas:
�� � 2 3��� � � ���� � ���� � ���4�� �3.87�
�� � 2 ���� � � ���� � ���� � ���+�� �3.88�
Es un sistema de múltiples entradas y múltiples salidas (MIMO, del inglés
Multiple-Input-Simple- Multiple), en el que existe un cierto acoplamiento, es
decir, que tanto la entrada �� como �� influyen en ambas salidas (�� e ��).
A partir de simulaciones o de un análisis de variación de estados, según la
variación de las entradas, se observa una mayor dependencia de �� con ��.
Análogamente, �� tiene una relación más estrecha con ��. Expresando
MIMO �� ��
�� ��

El convertidor en fuente de tensión como filtro activo
matemáticamente lo anteriormente expuesto a través de las expresiones (5.11)-
(5.12) queda:
�� 5 26���� � ���7�� �3.89�
�� 5 26����� � ���7�� �3.90�
Así podemos desacoplar el problema de control, a sacrificio de un error, ya
que realmente sí existe acoplamiento. Ahora se tiene dos sistemas SISO no
lineales:
Para esta alternativa de control se propone un controlador proporcional-
integral para cada componente desacoplada, mostrado en los diagramas de
bloques de la Figura 3.22. Antes se necesita expresar las intensidades �� e �� en
función de �� y ��, a través de las ecuaciones (3.89)-(3.90):
�� 5 ��� � ����2�� �3.91�
�� 5 ����2 � ����� �3.92�
Las expresiones (3.91)-(3.92) modela el comportamiento del correspondiente
sistema SISO, recalcado y enmarcado en la siguiente figura con un recuadro en
línea de trazos.
��
��
SISO
SISO
��
��

El convertidor en fuente de tensión como filtro activo
Figura 3.22 Diagramas de control de intensidades. Control
proporcional-integral.
Este método de control no es apropiado debido que el simplificado, objeto de
desacoplar las ecuaciones del modelo, está sujeto a errores. No obstante es de
interés los análisis anteriores.
3.2.3.3. Linealización exacta
Una estrategia muy utilizada es la linealización exacta por realimentación
(FL, del inglés Feedback-Linearization). Esta estrategia consiste en linealizar y
desacoplar el sistema a controlar mediante un cambio de variables, de tal forma
que el nuevo sistema transformado sea lineal y esté desacoplado. Luego, se
pueden aplicar estrategias de control lineales muy simples para definir
completamente el controlador. En general la estrategia de control por
realimentación que se aplicará en este trabajo es la denominada linealización
exacta entrada-salida. Así lo que se obtiene es una serie de entradas que "ven" a
las salidas a controlar a través de una dinámica lineal. Al aplicar esta estrategia
se debe tener en cuenta que si bien las entradas y salidas obedecen a un sistema
dinámico lineal estable, puede quedar un sistema remanente cuya dinámica no
sea estable. Sin embargo, en el caso particular estudiado en este trabajo, las
dinámicas internas son estables. Particularmente el sistema VSC es un sistema
muy propicio para aplicar esta estrategia de control. Para formular la estrategia
FL, las dos expresiones (3.59)-(3.60) se igualan a dos entradas auxiliares 8� y 8�:
���
���
PI ��� � ����2��
�� � ��� 0&� ��
��
�
� ��� 0&�
PI
�� ����2 � �����
��
� ��

El convertidor en fuente de tensión como filtro activo
���� � 1� �����2 � ��� � ���� � ���� � 8� �3.93�
���� � 1� �����2 � ��� � ���� � ���� � 8� �3.94�
Así, por un lado se tiene:
8� � 1� �����2 � ��� � ���� � ���� �3.95�
8� � 1� �����2 � ��� � ���� � ���� �3.96�
Y por otro: ���� � 8� �3.97�
���� � 8� �3.98�
De (3.97) y ( 3.98) se puede decir que las nuevas entradas 8� y 8�, sin
interpretación física pero con unidades V/H, controlan un sistema SISO y
lineal, el cual es simplemente un integrador para cada entrada. El sistema de
ecuaciones puede plantearse en dominio de Laplace (la transformada de
Laplace es útil para resolver problemas lineales de valores iniciales en los que
la ecuación diferencial tiene coeficientes constantes y gobierna un sistema
SISO):
1: ��
8�8�
1: �� 8�

El convertidor en fuente de tensión como filtro activo
Se plantea un lazo de control mediante un controlador proporcional-integral
para cada intensidad (Figura 3.23), esta vez teniendo como entradas 8� y 8� en
lugar de ��y ��:
Figura 3.23 Diagramas de bloque de control. Linealización exacta.
Si bien 8� y 8� "ven" el sistema de forma lineal y desacoplado, lo cierto es
que estas entradas son ficticias, son un artilugio matemático. Sin embargo, de �3.95�-�3.96� se pueden obtener las entradas reales, o al menos con la que
después, con la transformada de Park inversa, se convertirán en las señales
reales para controlar el generador de pulsos del PWM. De esta forma,
despejando las entradas ��y ��, se obtienen las siguientes expresiones:
�� � 26�8� � ��� � ���� � ���7�� �3.99�
�� � 26�8� � ��� � ���� � ���7�� �3.100�
Esta será la estrategia de control utilizada en las simulaciones del presente
trabajo, considerándose practicable pues se consigue linealizar y desacoplar en
sistemas SISO mediante un simple cambio de variables y no mediante
simplificaciones sujetas a errores tal como ocurre en el control proporcional-
integral desarrollado en el apartado 3.2.3.2..
8� �� � ��� PI 0&�
� ��
1:
��� �
� ��
0&� PI 8� 1:
��

El convertidor en fuente de tensión como filtro activo
3.2.3.4. Control de tensión
En el apartado 3.2.2.4. se mencionó que era interesante, desde el punto de
vista del control del bus de continua, que todo el peso de la tensión del punto
PCC recaiga sobre la componente q. De esta forma la tensión del bus de
continua (��) tendría una fuerte dependencia de ��, y el control quedaría
reducido al seguimiento de dicha intensidad. ���� 5 12> ���� �3.101�
A continuación se demuestra la dependencia (3.101). La ecuación que
modela la parte de continua del VSC viene dada por la siguiente expresión: ���� � 12> ����� � ����� �3.102�
Se parte del siguiente modelo eléctrico (Figura 3.23) expresado en el sistema
de referencia síncrono.
Figura 3.24 Modelo dq de la parte de alterna.
Para la demostración se hace uso de las hipótesis � ? 1 y � ? 1. Entonces, se
puede despreciar la caída de tensión de la inductancia y de la resistencia:
��� 5 @!)!,� �3.103�
��� 5 �A)!,2 �3.104�
Si el PLL es tal que ��� � 0 0 5 ���� �� 5 0
Luego, queda en evidencia que la tensión del bus de continua depende
principalmente de la corriente ��: ���� 5 12> ���� �3.105�
El hecho de que todo el peso de la tensión del punto PCC recaiga sobre la
componente q produce un interesante desacople en las potencias inyectadas en
punto PCC. Se puede manejar potencia activa y reactiva de forma
independientemente (ver Tabla 7.1).
� ���
���
�
�
��
��
�� � ����2
�� � ����2
�

El convertidor en fuente de tensión como filtro activo
B 5 ����� �3.106� A 5 ����� �3.107�
El siguiente paso es diseñar un algoritmo o diagrama de control para
mantener la tensión del condensador del bus de continua constante. Cualquier
flujo de potencia activa que sea proporcionado por el condensador hacia la red
hará que éste reduzca su tensión. Por consiguiente, cualquier flujo de activa que
la red le entregue al condensador inflará dicha tensión. El VSC no suministra
potencia neta a la red, es decir, el promedio de la potencia inyectada (potencia
armónica activa y/o reactiva) es nulo. Eso sí, la entrega-consumo de potencia
activa armónica hace oscilar la tensión del condensador en torno un valor
medio. El control de la tensión es necesario para que la energía almacenada en
el condensador no suministre las pérdidas de potencia activa (B CDD, producidas
en las conmutaciones, las resistencias internas y en las resistencias asociadas a
las inductancias de acoplamiento), fenómeno que iría acompañado de una
reducción de la tensión. En cambio, la potencia reactiva, que siempre tiene
promedio nulo, no repercute en la tensión del condensador ya que dicha
potencia es un mero intercambio de potencia entre fases sin intercambio neto de
potencia entre dos subsistemas (en el presente trabajo entre el VSC y la red). En
resumen, se requiere que el sistema eléctrico aporte las pérdidas de potencia
activa (en definitiva un aporte de ��). Como criterio de signos adoptado, se
considera positiva toda potencia (o intensidad asociada) que sea extraída del
convertidor o inyectada al punto PCC (Figura 3.3). Así, el convertidor
demandaría de la red una potencia activa equivalente a las pérdidas, o lo que es
lo mismo el VSC debe inyectar en el PCC, además de la potencia armónica, una
potencia activa instantánea asociada a las pérdidas de valor �B CDD.
En primer lugar se analizará el caso en el que la tensión del bus de continua
es controlado, a través de un Δ��. Desde el punto de vista de la compensación
de intensidades armónicas, Δ�� debe de ser descontada a ��FGH, tal y como exige el
criterio de signos adoptado. ���� � 12> ���� �3.108�
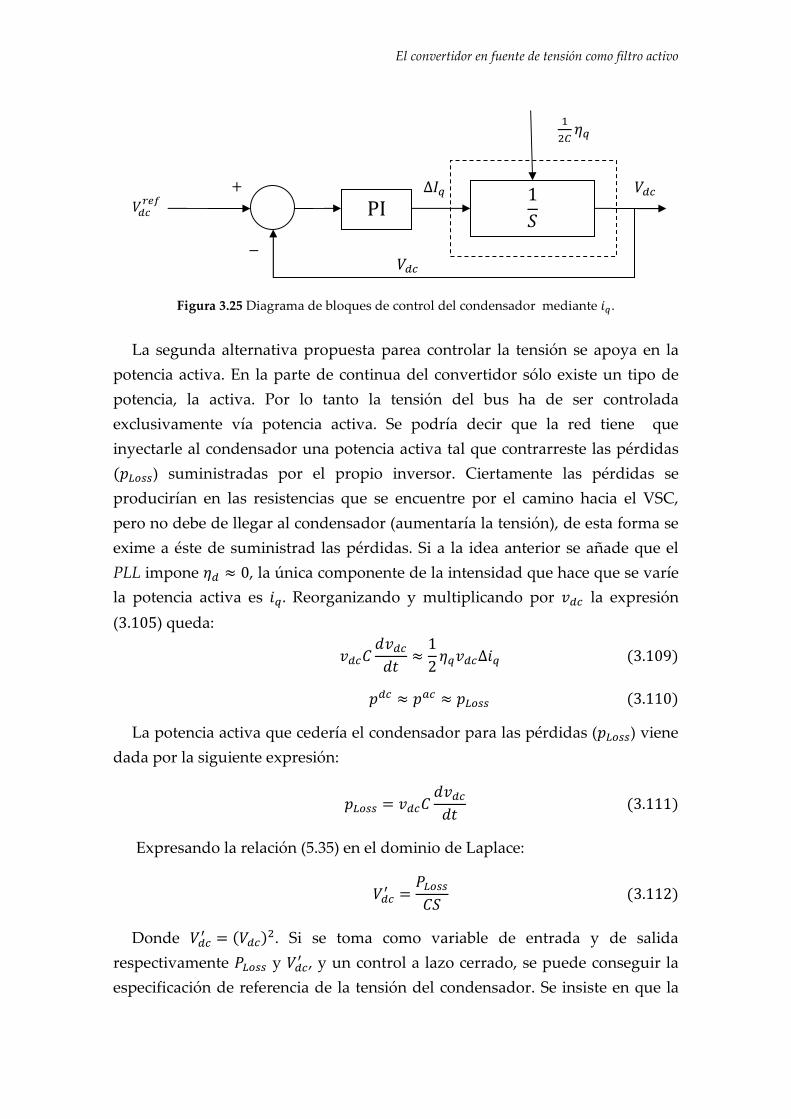
Expresando la ecuación diferencial (3.108) en el dominio de Laplace (para
ello ha de suponerse que �� no varía demasiado y que ésta se toma como un
parámetro que es absorbido por el propio controlador proporcional-integral) e
introduciéndola en un lazo de control en el que se toma como variables de
entrada y salida a �� y �� respectivamente, se obtiene el diagrama de bloques
de la Figura 3.25.
El convertidor en fuente de tensión como filtro activo
Figura 3.25 Diagrama de bloques de control del condensador mediante �� .
La segunda alternativa propuesta parea controlar la tensión se apoya en la
potencia activa. En la parte de continua del convertidor sólo existe un tipo de
potencia, la activa. Por lo tanto la tensión del bus ha de ser controlada
exclusivamente vía potencia activa. Se podría decir que la red tiene que
inyectarle al condensador una potencia activa tal que contrarreste las pérdidas �B CDD) suministradas por el propio inversor. Ciertamente las pérdidas se
producirían en las resistencias que se encuentre por el camino hacia el VSC,
pero no debe de llegar al condensador (aumentaría la tensión), de esta forma se
exime a éste de suministrad las pérdidas. Si a la idea anterior se añade que el
PLL impone �� 5 0, la única componente de la intensidad que hace que se varíe
la potencia activa es �� . Reorganizando y multiplicando por �� la expresión
(3.105) queda: ��> ���� 5 12 ������ �3.109�
B� 5 BI 5 B CDD �3.110�
La potencia activa que cedería el condensador para las pérdidas (B CDD) viene
dada por la siguiente expresión:
B CDD � ��> ���� �3.111�
Expresando la relación (5.35) en el dominio de Laplace:
J�K � L CDD>M �3.112�
Donde J�K � �J���. Si se toma como variable de entrada y de salida
respectivamente L CDD y J�K , y un control a lazo cerrado, se puede conseguir la
especificación de referencia de la tensión del condensador. Se insiste en que la
N�� ��
J�
ΔO� J� PI 1M
� J�FGH
�

El convertidor en fuente de tensión como filtro activo
potencia B CDD ha de ser descontada a la potencia armónica de referencia por
motivo del criterio de signos adoptado.
Figura 3.26 Diagrama de bloque de control del condensador DC
mediante potencia activa.
Una última consideración sobre la tensión del bus de continua permite
enfatizar que ésta ha de tomarse como un parámetro desde el punto de vista del
control de intensidades, para así poder realizar y aprovechar las virtudes de la
técnica Feedback Linearization.
3.2.3.5. Capacidad de control de corrientes de un APF
Se establecerá que condiciones han cumplirse a la hora de diseñar e
implementar un filtro activo, para garantizar la capacidad de control de
intensidades, con objetivo de generar unas intensidades de referencia [5].
El análisis de capacidad propuesto hace uso de las magnitudes en referencia
estacionaria. Para conseguir dicha referencia se aplica la Transformación de Clarke
a las ecuaciones trifásicas del modelo, obteniéndose así las ecuaciones del
modelo en ejes PQ. En los siguientes desarrollos se desprecia la resistencia
asociada al factor de calidad de la inductancia de acoplamiento del filtro. A
continuación se describe el procedimiento para expresar el modelo en
coordenadas PQ.
Lo más sencillo es trabajar matricialmente las expresiones trifásicas de
estructura variable (3.10)-(3.12), estructura provocada por los diferentes estados
asociados a la función de conmutación >R : 1, :� MR ST U MRK SVV
>R �
�1, :� MR SVV U MRK ST
Figura 3.27 Función de conmutación >R . W X � Y, Z, [.
J��
L CDD J�� PI 1>M
� J��,FGH
�

El convertidor en fuente de tensión como filtro activo
Indicar que el modelo requerido para el análisis de capacidad de control es el
expresado mediante los estados, es decir, en función de >R, que corresponde a
las expresiones (3.10)-(3.12). Se insiste en que no es el modelo promediado.
0 � ��I � � ��I� � 13 �>I � >\ � >2 + �� �3.113�
0 � ��\ � � ��\� � 13 �>\ � >I � >2 + �� �3.114�
0 � �� � � ��� � 13 �> � >I � >\2 + �� �3.115�
]I\ � ^�I�\� _ `I\ � Na bcd>I � �e$�,�>\ � �f$�,�> � �f$�e� gh
i
�I\ � ^��I��\�� _ j � ^� 0 00 � 00 0 �_
La relación �3.116� expresa el modelo de forma matricial.
j �]I\� � `I\�� � �I\ �3.116�
Aplicando la Transformación de Clarke k a las variables involucradas en el
desarrollo: ]I\ � k.N]lm �3.117� `I\ � k.N`lm �3.118� �I\ � k.N�lm �3.119�
Introduciendo las expresiones (5.41)-(5.43) en (5.40) se obtiene:
j �k.N]lm� � k.N`lm�� � k.N�lm �3.120�
La transformación de variables es ejecutada mediante una matriz de
coeficientes constantes. Esta característica hará que las ecuaciones del modelo
obtenido no estén acopladas.
jk.N �]lm� � k.N`lm�� � k.N�lm �3.121�
El convertidor en fuente de tensión como filtro activo
Multiplicando toda la ecuación por T y sabiendo que j � �n, donde n es la matriz identidad:
�knk.N �]lm� � kk.N`lm�� � kk.N�lm �3.122�
Finalmente, simplificando se obtiene la ecuación diferencial matricial que
modela y permite gobernar la parte de alterna en coordenadas PQ:
j �]lm� � `lm�� � �lm �3.123�
Una vez obtenido el modelo se prodece al análisis de capacidad de control o
controlabilidad de las intensidades de referencia. Se propone un cambio de
nomenclatura con el fin de facilitar la escritura y comprensión: {�>� � `lm�� �3.124�
De forma que la expresión (3.124) puede reescribirse como:
j �]lm� � {�>� � �lm �3.125�
A continuación se define un vector error de intensidad (∆]lm):
∆]lm � ]lmFGH � ]lm �3.126�
Donde ]lmFGH e ]lm son respectivamente las intensidades de referencia y
compensada, expresadas en componentes PQ. Al manipular la relación (3.126) e
introducirla en (3.125):
j �∆]lm� � ^j �]lmFGH� � �lm_ � {�>� �3.127�
Reescribiendo la ecuación (3.127):
j �∆]lm� � }~ � {�>� �3.128�
Donde }~ es un vector de voltages el cual permite al filtro activo de potencia
inyectar una compensación de corriente igual a la de referencia:
}~ � j �]lmFGH� � �lm �3.129�
La expresión (3.128) advierte que una posible desviación de voltaje entre }~ y {�>� produce error en la corriente ]lm. El objetivo es obtener una expresión de {�>� para poder ser comparada con }~, con el fin de establecer un criterio de

El convertidor en fuente de tensión como filtro activo
capacidad de control de intensidades. Para ello hay que manipular la expresión
(3.124): {�>� � k`I\�� �3.130�
Intruciendo las expresiones de cada término en la relación (3.130� queda una
expresión (3.131� que permite evaluar {�>� en los 8 estados posibles que se
puede encontrar el VSC. Las evaluaciones quedan recogidas el la Tabla 3.2.
{�>� � �JlJm+ � �2 3⁄3 · �1 �1 2� �1 2�0 � √3 2� √3 2� � ·bccd
�>I � >\ � >2 +�>\ � >I � >2 +�> � >I � >\2 +g
hhi · �� �3.131�
Donde:
1, :� MR ST U MRK SVV
>R �
�1, :� MR SVV U MRK ST
Figura 3.28 Función de conmutación >R . W X � Y, Z, [.
{� `� `� `� {� {� JN 1 -1 -1 �2 3⁄ 0 J� -1 -1 1 ��2 3⁄ 2⁄ √2 2⁄ Ja 1 -1 1 �2 3⁄ 2⁄ √2 2⁄ J� -1 1 -1 ��2 3⁄ 2⁄ � √2 2⁄ J� 1 1 -1 �2 3⁄ 2⁄ � √2 2⁄ J� -1 1 1 ��2 3⁄ 0 J� 1 1 1 0 0 J� -1 -1 -1 0 0
Tabla 3.2: Evaluación de {�>� según estado de conmutación � � 1, … ,8.

El convertidor en fuente de tensión como filtro activo
Gráficamente {�>� queda ilustrado en la Figura 3.29.
Figura 3.29 Hexágono J� W � � 1, … ,8 y 0~.
El hexágono proporciona información sobre la posibilidad de controlar las
intensidades a fin de un exhaustivo seguimiento de referencia. El criterio es tal
que no aparecerá error en entre �lmFGH e �lm mientras que 0~ siempre este en el
interior del hexágono formado.
En cuanto a la controlabilidad, a mayor tamaño del hexágono, es decir,
cuanto mayor sea ��, mayor será ésta. Como regla general, en la industria e
instalaciones, la tensión �� es suficiente con el doble de la tensión del punto
PCC. Tener en cuenta que cuanto mayor �� mayor coste del equipo. Desde el
otro punto de vista cuanto menor sea la inductancia de acoplamiento L menor
será 0~, por lo que aumentará la controlabilidad de las corrientes. En
contraposición, a menor inductancia mayor rizado indeseado de las
intensidades. No obstante podemos contrarestar dicho rizado aumentando la
frecuencia de conmutación de los IGBTs, siempre y cuando el increnmento de
pérdidas asociado al aumento de frecuencia de conmutación sea tolerable.
Dada unas intensidades de referencia a compensar (�lmFGH), por lo tanto dado
un ,��lmFGH � ⁄ , el objetivo es alcanzar un compromiso entre ��, L, y el rizado de
las intensidades compensadas, de forma que el sistema sea controlable, es decir,
que se alcance un error prácticamente nulo en las corrientes de compensación.
Jm
Jl
J� � ^√22 ��[, � �2 3⁄2 ��[_
Ja � ^√22 ��[, �2 3⁄2 ��[_
JN � 30, �2 3⁄ ��[4
^� √22 ��[, �2 3⁄2 ��[_ � J�
^� √22 ��[, � �2 3⁄2 ��[_ � J�
J� � 30, ��2 3⁄ ��[4
J� J�
0~

El convertidor en fuente de tensión como filtro activo
3.2.4. Modulación por ancho de pulsos
La Modulación por Ancho de Pulsos (MAP o PWM, del inglés Pulse-Width-
Modulation) es una técnica que permite controlar el comportamiento de ciertos
dispositivos de electrónica de potencia, principalmente MOSFETs e IGBTs
(Ambos se comportan idealmente como interruptores). Por ejemplo, los
inversores, dispositivos compuestos por una serie de IBGTs y una fuente de
tensión de tensión o intensidad de continua, necesitan esta técnica para poder
controlar la magnitud y la frecuencia de la señal de salida, en general un voltaje
de continua. PWM es el proceso de modificar el ancho de los pulsos de un tren
de pulsos. Estos pulsos provocan que los interruptores estén en estado abierto o
estado cerrado, de forma que se modifica el ciclo de trabajo de éstos. Se define
el ciclo de trabajo o Duty Cicle de una señal periódica como el ancho relativo de
su parte positiva en relación con el período:
� � �� �3.132�
Donde:
- � es el ciclo de trabajo (Duty Cicle), � 0,1�. - τ es el tiempo en que la función es positiva (ancho del pulso).
- T es el período de la función.
El estado de los interruptores puede modelarse a través de diversas
funciones (funciones de conmutación). Si se modela mediante una función ����
que tome valor binario,
1 si �� 0, �� ���� � �3.133�
0 si �� �, ��
el ciclo de trabajo también se define como el promedio de la función g(t) en el
intervalo de tiempo T:
� � 1� � ������ � 1
��
�� 1�� � �
��
� �3.134�
En la Figura 3.30 se ilustra una interpretación gráfica del Duty y la función
����.
El convertidor en fuente de tensión como filtro activo
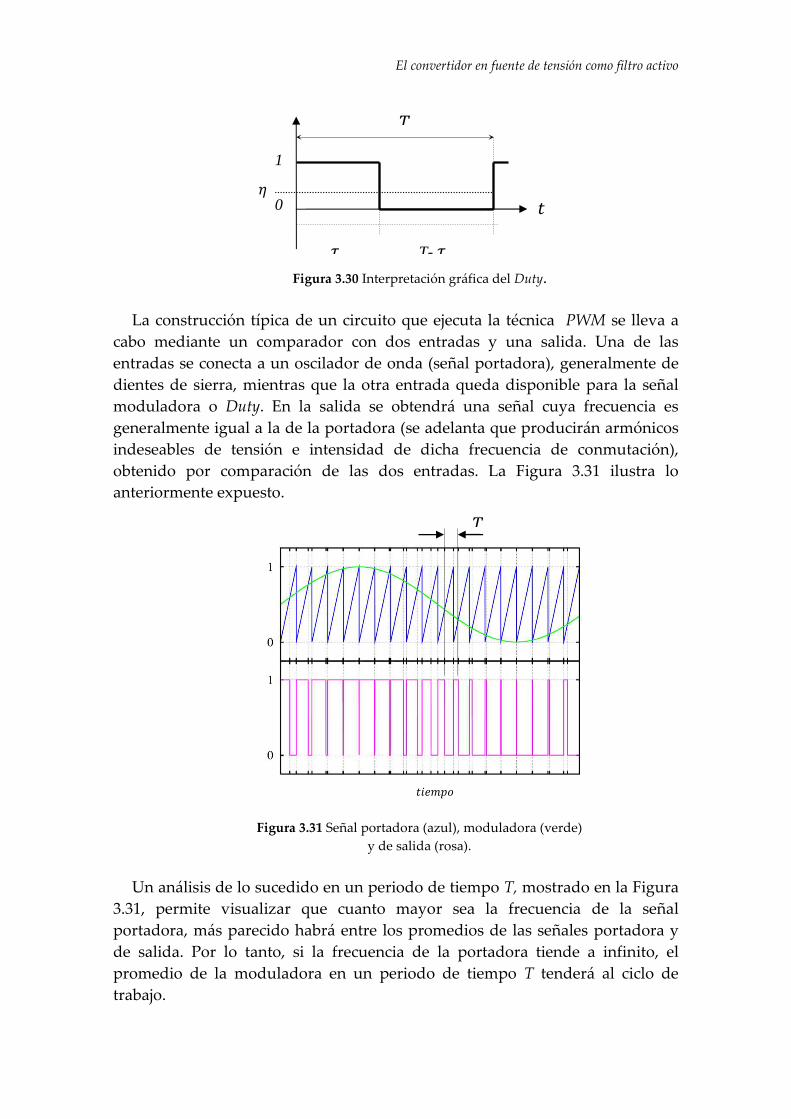
Figura 3.30 Interpretación gráfica del Duty.
La construcción típica de un circuito que ejecuta la técnica PWM se lleva a
cabo mediante un comparador con dos entradas y una salida. Una de las
entradas se conecta a un oscilador de onda (señal portadora), generalmente de
dientes de sierra, mientras que la otra entrada queda disponible para la señal
moduladora o Duty. En la salida se obtendrá una señal cuya frecuencia es
generalmente igual a la de la portadora (se adelanta que producirán armónicos
indeseables de tensión e intensidad de dicha frecuencia de conmutación),
obtenido por comparación de las dos entradas. La Figura 3.31 ilustra lo
anteriormente expuesto.
Figura 3.31 Señal portadora (azul), moduladora (verde)
y de salida (rosa).
Un análisis de lo sucedido en un periodo de tiempo T, mostrado en la Figura
3.31, permite visualizar que cuanto mayor sea la frecuencia de la señal
portadora, más parecido habrá entre los promedios de las señales portadora y
de salida. Por lo tanto, si la frecuencia de la portadora tiende a infinito, el
promedio de la moduladora en un periodo de tiempo T tenderá al ciclo de
trabajo.
�
0
1
� T- �
�
�
������
�

El convertidor en fuente de tensión como filtro activo
A continuación se propone un pequeño ejemplo de aplicación de PWM con
objeto de obtener una mejor comprensión de dicha técnica. Dado el siguiente
circuito ideal de la Figura 3.32 y mediante las ideas anteriormente expuestas,
se desea obtener una intensidad cosenoidal mediante PWM. Como fuentes
generadoras de potencia se dispone de dos fuentes de tensión de continua
dispuesta según Figura 3.32. Además, dos interruptores A y B y una
inductancia la cual actuará como filtro paso bajo.
Figura 3.32 Circuito ejemplo para aplicación de PWM.
En el circuito de la Figura 3.32 se cumple, independientemente del estado de
los interruptores, la siguiente relación de tensiones entre el punto M, la tierra
del circuito y la tensión de la bobina:
� ! �" � 0 �3.135�
Introduciendo la relación existente entre la tensión de la bobina y la
intensidad que circula a través de éste en la expresión (3.135) se obtiene la
ecuación diferencial que gobierna el circuito de la Figura 3.32:
� ! $ ���� � 0 �3.136�
Es necesario introducir una variable no continua C (llamada comúnmente
función de conmutación) la cual tiene como misión modelar el estado de
conmutación de ambos interruptores (A y B), de tal forma que siempre se
encuentren en estados complementarios. Es decir, nunca estarán los dos
interruptores cerrados a efectos de provocar un indeseado cortocircuito.
1, &� ' () * + (,,
- � !1, &� ' (,, * + ()
Figura 3.33 Función de conmutación. Estados de conmutación
de los interruptores A y B.
. V
'
0 V
/
�
� �
�"
-
+
. V
$
�012 � cos�6�� +
El convertidor en fuente de tensión como filtro activo
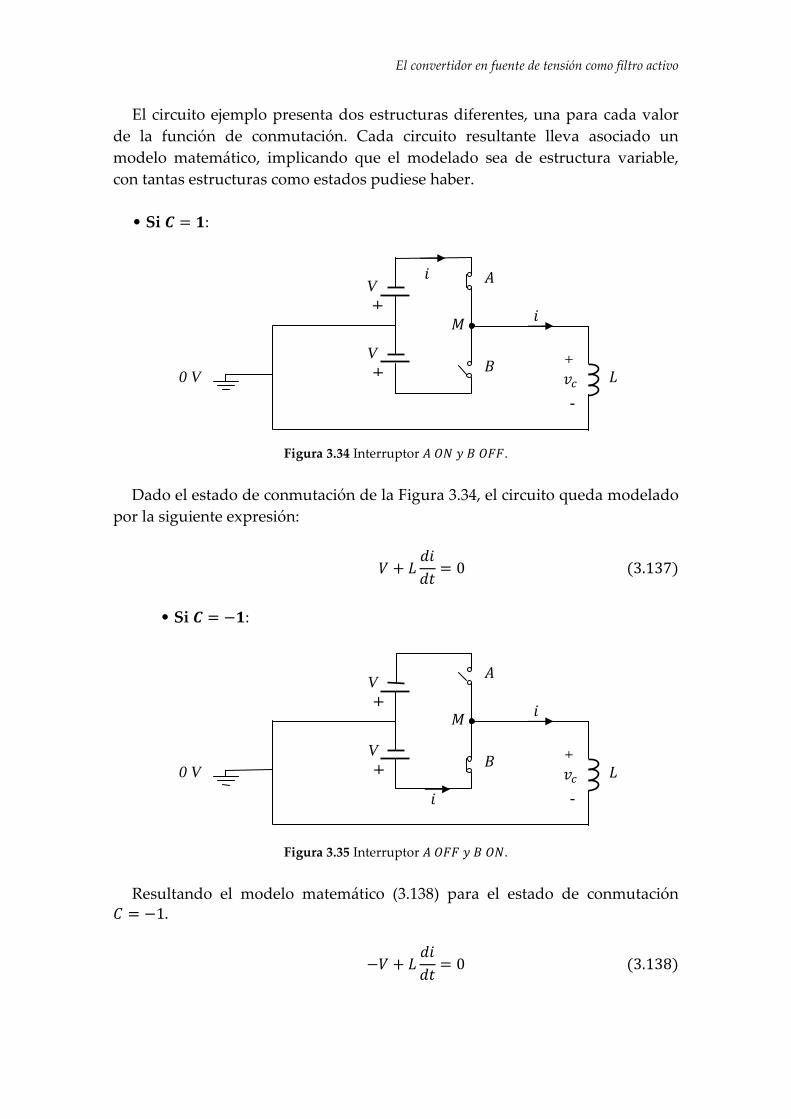
El circuito ejemplo presenta dos estructuras diferentes, una para cada valor
de la función de conmutación. Cada circuito resultante lleva asociado un
modelo matemático, implicando que el modelado sea de estructura variable,
con tantas estructuras como estados pudiese haber.
• Si 7 � 8:
Figura 3.34 Interruptor ' () * + (,,.
Dado el estado de conmutación de la Figura 3.34, el circuito queda modelado
por la siguiente expresión:
9 . $ ���� � 0 �3.137�
• Si 7 � !8:
Figura 3.35 Interruptor ' (,, * + ().
Resultando el modelo matemático (3.138) para el estado de conmutación - � !1.
!9 . $ ���� � 0 �3.138�
. V
. V
. V
. V
-
�
+
�
+ $
'
0 V
/
�"
-
�
+
�
+ $
'
0 V
/
�"

El convertidor en fuente de tensión como filtro activo
La tensión del punto M puede expresarse en función de la conmutación
mediante la siguiente expresión:
� � !9- �3.139�
La ecuación de estructura variable que contempla las dos situaciones
relativas al estado de conmutación se consigue introduciendo la expresión
(3.140) en la ecuación (3.136), resultando:
9- . $ ���� � 0 �3.140�
La complementariedad de ambos interruptores puede visualizarse
gráficamente en las Figuras 3.36-3.37.
Figura 3.36 Estado de conmutación del interruptor A.
(' � 1 abierto, ' � !1 cerrado).
Figura 3.37 Estado de conmutación del interruptor B.
(+ � 1 abierto, + � !1 cerrado).
Realmente debe existir un tiempo muerto que asegure que los interruptores
no conduzcan al mismo tiempo, evitándose así un posible cortocircuito. Dicha
zona hay que tratarla con cierto cuidado, ya que si es muy grande puede haber
una pérdida sensible de información, en el sentido de que la salida no
reproduzca bien la moduladora. Las Figuras 3.36-3.37 y la expresión (3.139)
- � !1 - � 1
- � !1 - � 1
-1
A
1
� T- �
�
�
B
-1
1
� T- �
�
�

El convertidor en fuente de tensión como filtro activo
ponen en evidencia que la tensión del punto M (� ), sigue la evolución
mostrada en la Figura 3.38 en un periodo T.
Figura 3.38 Tensión del punto M en un período T.
Se busca un modelo del circuito que no sea de estructura variable, es decir,
que la ecuación diferencial gobernante del circuito no varíe estructuralmente en
el tiempo en función del estado, a fin de un modelo más simple y manipulable.
Para ello se recurre a un modelo promediado, de forma que se tomará el
promediado de C (expresión (3.142)) como variable modeladora del estado en
un período de tiempo T. El promedio está relacionado con el ciclo de trabajo tal
y como muestra la expresión (3.142). El modelo promediado resultante es más
representativo del problema original, cuanto mayor sea la frecuencia de la
portadora. Teóricamente, si la frecuencia de conmutación es infinita el modelo
promediado es exactamente igual que el original.
-= � 1� � -�� � 1
��
�>� 1�� . � �!1����
��
�? � 2 �
� ! 1 �3.141�
-= � 2 �� !� 2� ! 1 �3.142�
Así queda un modelo promediado expresado por una única ecuación:
9-= . $ ���� � 0 �3.143�
Se introduce la relación (3.142) en la expresión (3.143) con objeto de
introducir el ciclo de trabajo en el modelo promediado, ya que ésta es la
variable que realmente actuará como señal moduladora que requiere la técnica
PWM:
9�2� ! 1� . $ ���� � 0 �3.144�
A efectos de una simple aplicación de la técnica PWM se hace un pequeño
control a lazo abierto, tomándose como variable de entrada y salida,
�
9 - � 1 - � !1
�
-V
� T- �
�

El convertidor en fuente de tensión como filtro activo
respectivamente a � y �. Para ello se impone en la expresión del modelo (3.144)
que la intensidad i sea una intensidad de referencia solicitada �012.
�012 � cos�6�� �3.145�
9�2� ! 1� . $ ���� � 0 �3.146�
� � �012 �3.147�
La resolución del sistema de expresiones (3.145-3.147) proporciona el valor
del ciclo de trabajo que produce una modulación por ancho de pulsos tal que la
intensidad i del circuito sea la intensidad de referencia (�012).
� � $6sin�6��29 . 1
2 �3.148�
Para un correcto funcionamiento de la técnica PWM, debe de cumplirse
necesariamente la condición (3.149), de forma que se garantice que � � 0,1�.
!1 B $69 B 1 �3.149�
En sucesivos análisis y figuras se supondrá que el cociente CDE anterior es de
valor unidad. Entonces
� � sin�6��2 . 1
2 �3.150�
Figura 3.39 Señal portadora (azul), moduladora (verde)
y de salida (rosa).
El ciclo de trabajo reproduce un tren de pulsos (-F) al ser comparado con la
señal portadora. El tren de pulsos corresponde a una función de conmutación
�
-G ������

El convertidor en fuente de tensión como filtro activo
binaria, cuyo promediado se acerca al ciclo de trabajo cuanto más alta es la
frecuencia de la señal portador.
El modelo de estructura variable podría haberse formulado directamente con
una función de conmutación -F:
1 si � � 0, �� -F � �3.151�
0 si � � �, ��
Donde los nuevos estados de conmutación viene dado por la Figura 3.40. El
promediado de -F coincide exactamente con el ciclo de trabajo.
-′H � 1� � -�� � 1
��
�>� 1�� . � �0����
��
�? � � �3.152�
1, &� ' () * + (,,
-F � 0, &� ' (,, * + ()
Figura 3.40 Estados de conmutación alternativo de los interruptores A y B
Se ha optado por un modelo con - � I!1,1J, ya que es más intuitivo a la
hora de ver el problema. La expresión (3.142) permite relacionar C y -F (el
promediado de (3.151) da la relación (3.142)).
- � 2-’ ! 1 �3.153�
Como se aprecia en la Figura 3.39, la esencia del método consiste en generar
un tren de pulsos -F de altura fija pero de anchura variable, más o menos
proporcional a la amplitud de la onda de referencia a modular, mediante la
comparación de la señal moduladora y portadora. Indicar que la frecuencia de
la señal portadora debe ser al menos diez veces superior a la de la referencia
para que el método sea efectivo. Teniendo en cuenta la expresión (3.139), la
tensión del punto M tomará valor +V o -V según el tren de pulsos.

El convertidor en fuente de tensión como filtro activo
Figura 3.41 Tensión � generada.
Se puede demostrar que la frecuencia fundamental del tren de pulsos
coincide con la señal moduladora. Por consiguiente la componente fundamental
de la tensión � generada tiene como componente fundamental � L. Se supone
que la inductancia L actúa de filtro paso bajo de tal forma que absorbe todos los
armónicos de intensidad. Dicho resultado es alcanzado si y solo sí la tensión
generada sólo tuviese componente fundamental tal que la corriente cumpla la
restricción de forma cosenoidal. El problema se reduce a comprobar que la
tensión generada tiene una componente fundamental tal que la intensidad
circulante sea la deseada. Para realizar dicha tarea se supondrá que � es
puramente fundamental.
� � � L � 9&�M�6�� �3.154�
Sustituyendo (3.154) en la ecuación diferencial gobernante del circuito (3.136)
se tiene:
9&�M�6�� . $ ���� � 0 �3.155�
Integrando la expresión (3.155) se obtiene finalmente el resultado del
problema.
� � � ! 9$ &�M�6���� � cos �6�� �3.156�
El objeto en cuestión de dicho proyecto es forzar al PWM a generar unas
intensidades de referencia mediante una fuente de tensión. Mediante pulsos de
tensión positivos y negativos se tienen que conseguir dichas intensidades. La
clave está en relacionar las corrientes de referencia con el Duty a través de las
expresiones promediadas representativas del modelo en estudio.
!9
������
.9