2. Geometría analítica sólida
43
2. Geometra analtica slida 2.1. Introduccin En este captulo, aplicaremos el Ælgebra vectorial al estudio de la geometra euclidiana tridimensional y, entonces, en la œltima seccin generalizaremos al- gunos de los resultados obtenidos en este espacio a los espacios n-dimensionales. Las propiedades de los vectores bajo las operaciones de adicin, multiplicacin por un escalar y producto escalar se utilizarÆn en este captulo. Se introducirÆ en V 3 una nueva operacin sobre vectores denominada producto vectorial. Este producto vectorial se aplica a dos vectores en V 3 y da como resultado un vector en V 3 . La importancia del producto vectorial reside en el hecho de que tanto su longitud como su direccin tienen un uso relevante en geometra y fsica. 2.2. Espacio euclidiano tridimensional Con el n de apreciar la terminologa que describiremos en esta seccin y tambiØn para ayudar a comprender la manera en que el Ælgebra vectorial se aplica en geometra, explicaremos primero cuÆles son las imÆgenes geomØtricas que se encuentran tras el lenguaje que vamos a utilizar. Cuando denotamos un vector con una letra mayœscula digamos P =(x; y; z) indicamos que P ha de considerarse como un radio vector o vector de posicin ( es decir, el punto inicial de la echa que representa P es el origen), o como el punto terminal del radio vector P =(x; y; z), y en este caso, los nœmeros x; y; z se llaman coordenadas del punto P. As, (x; y; z) puede llamarse vector, radio vector o punto, y los nœmeros x; y; z pueden llamarse componentes o coordenadas. El lenguaje que se utilice depende de cual sea la aplicacin que el usuario tiene en mente. Si denotamos un vector con una letra minœscula negrita a =(x; y; z), debemos entender que el vector se estÆ usando para representar una direccin y una magnitud. En cualquier caso, los nombres que usemos no afectarÆn el Ælgebra de los vectores aunque la terminologa pueda resultar necesaria para comprender alguna aplicacin particular del Ælgebra vectorial. Ahora ya estamos en condiciones de dar una descripcin de nuestro mod- elo analtico del espacio euclidiano. Llamamos a este modelo espacio analtico euclidiano tridimensional o, simplemente, espacio euclidiano tridimensional. El espacio euclidiano tridimensional se denota por R 3 (lØase R tres). En la deni- cin de R 3 debemos especicar que es lo que debemos entender por puntos, rectas y planos. Los puntos de R 3 son las ternas ordenadas (x; y; z) de V 3 . Los nœmeros x; y; z han de visualizarse como las coordenadas rectangulares del punto P =(x; y; z) (ver la gura 1). Nuestra denicin de una recta en R 3 nace de la idea intuitiva de que una recta estÆ determinada por un punto P 0 y una direccin a (a es un vector no nulo) (ver gura 2). Los puntos P sobre la recta L que pasa por P 0 en la direccin de a son, todos puntos de la forma P = P 0 + t a, donde t es un nœmero real. Denotamos este conjunto por fP 0 + t a j t 2 Rg, lo que leemos: el conjunto de todos los puntos P 0 + t a con t 2 R. Son todos los puntos que pueden alcanzarse 1
Transcript of 2. Geometría analítica sólida

2. Geometría analítica sólida
2.1. Introducción
En este capítulo, aplicaremos el álgebra vectorial al estudio de la geometríaeuclidiana tridimensional y, entonces, en la última sección generalizaremos al-gunos de los resultados obtenidos en este espacio a los espacios n-dimensionales.Las propiedades de los vectores bajo las operaciones de adición, multiplicaciónpor un escalar y producto escalar se utilizarán en este capítulo. Se introduciráen V3 una nueva operación sobre vectores denominada producto vectorial. Esteproducto vectorial se aplica a dos vectores en V3 y da como resultado un vectoren V3. La importancia del producto vectorial reside en el hecho de que tanto sulongitud como su dirección tienen un uso relevante en geometría y física.
2.2. Espacio euclidiano tridimensional
Con el �n de apreciar la terminología que describiremos en esta sección ytambién para ayudar a comprender la manera en que el álgebra vectorial seaplica en geometría, explicaremos primero cuáles son las imágenes geométricasque se encuentran tras el lenguaje que vamos a utilizar. Cuando denotamos unvector con una letra mayúscula � digamos P = (x; y; z)� indicamos que P hade considerarse como un radio vector o vector de posición ( es decir, el puntoinicial de la �echa que representa P es el origen), o como el punto terminaldel radio vector P = (x; y; z), y en este caso, los números x; y; z se llamancoordenadas del punto P. Así, (x; y; z) puede llamarse vector, radio vector opunto, y los números x; y; z pueden llamarse componentes o coordenadas. Ellenguaje que se utilice depende de cual sea la aplicación que el usuario tiene enmente. Si denotamos un vector con una letra minúscula negrita a = (x; y; z),debemos entender que el vector se está usando para representar una direccióny una magnitud. En cualquier caso, los nombres que usemos no afectarán elálgebra de los vectores aunque la terminología pueda resultar necesaria paracomprender alguna aplicación particular del álgebra vectorial.Ahora ya estamos en condiciones de dar una descripción de nuestro mod-
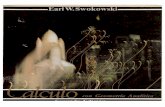
elo analítico del espacio euclidiano. Llamamos a este modelo espacio analíticoeuclidiano tridimensional o, simplemente, espacio euclidiano tridimensional. Elespacio euclidiano tridimensional se denota por R3 (léase R tres). En la de�ni-ción de R3 debemos especi�car que es lo que debemos entender por puntos,rectas y planos. Los puntos de R3 son las ternas ordenadas (x; y; z) de V3. Losnúmeros x; y; z han de visualizarse como las coordenadas rectangulares del puntoP = (x; y; z) (ver la �gura 1).Nuestra de�nición de una recta en R3 nace de la idea intuitiva de que una
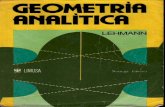
recta está determinada por un punto P0 y una dirección a (a es un vector nonulo) (ver �gura 2). Los puntosP sobre la recta L que pasa porP0 en la direcciónde a son, todos puntos de la forma P = P0 + ta, donde t es un número real.Denotamos este conjunto por fP0 + ta j t 2 Rg, lo que leemos: el conjunto detodos los puntos P0+ ta con t 2 R. Son todos los puntos que pueden alcanzarse
1

Figura 1: P = (x; y; z):
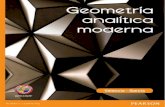
desde P0, partiendo desde P0, siguiendo una dirección paralela a a.La de�nición de un plano en R3 surge de la idea de que un plano está determi-
nado por dos rectas no paralelas L1 y L2 de direcciones a y b, respectivamente,que se cortan en un punto P0 (ver �gura 3). Los puntos P sobre el plano Pdeterminado por L1 y L2 son todos los puntos de la forma P = P0 + ua+ v b,donde u y v son números reales.La distancia en el espacio euclidiano tridimensional R3 del punto P1 al punto
P2 se de�ne como la longitud del vector P2 � P1. Nuestro espacio euclidianotridimensional R3 es, por tanto, V3 con las nociones de punto, recta, plano ydistancia de�nidas como acaba de explicarse.
De�nición 1 El espacio (analítico) euclidiano tridimensional, denotado porR3, es el espacio vectorial tridimensional V3 donde:
1. Los elementos (x; y; z) de V3 son los puntos de R3.
2. Un conjunto L de puntos de R3 es una recta si hay un punto P0 2 R3 yun vector no nulo a 2 V3 tal que
L = fP0 + taj t 2 Rg ;
3. Un conjunto P de puntos de R3 es un plano si hay un punto P0 2 R3 ydos vectores no nulos a;b 2 V3 tales que
P = fP0 + ua+ v bju; v 2 Rg ;
4. La distancia, denotada por d(P1;P2), del punto P1 = (x1; y1; z1) al puntoP2 = (x2; y2; z2) es la longitud del vector P2 �P1, es decir
d(P1;P2) = jP2 �P1j =p(x2 � x1)2 + (y2 � y1)2 + (z2 � z1)2:
2

Figura 2: Una recta en R3:
Figura 3: P = P0 + ua+ v b:
3

Las ecuacionesP = P0 + ta
yP = P0 + ua+ v b
se llaman ecuaciones vectoriales de la recta y el plano, respectivamente. Lasecuaciones correspondientes entre los componentes
x = x0 + t a1; y = y0 + t a2; z = z0 + t a3
yx = x0 + u a1 + v b1; y = y0 + u a2 + v b2; z = z0 + u a3 + v b3
se llaman ecuaciones paramétricas de la recta y el plano, respectivamente.
Ejemplo 2 Determine una recta que pase por los puntos P0 = (1; 1; 2) y P1 =(1; 2; 0):
Solución. (Ver la �gura 4.) Sea a = P1 �P0 = (0; 1;�2). Entonces,
L = fP0 + t (P1 �P0)j t 2 Rg
es claramente una recta que contiene a P0 y a P1, ya que P0 resulta de hacert = 0 y P1 de hacer t = 1. Luego
L = f(1; 1; 2) + t(0; 1;�2)g = f(1; 1 + t; 2� 2t)g
es una recta que pasa por (1; 1; 2) y (1; 2; 0).
Ejemplo 3 Determine un plano que pase por los puntos P0 = (1; 0; 0), P1 =(0; 1; 0) y P2 = (0; 0; 1).
Solución. (Ver la �gura 5.) De�namos a = P1 �P0, b = P2 �P0 y
P = fP0 + ua+ v bju; v 2 Rg= fP0 + u (P1 �P0) + v (P2 �P0)g :
Como a = (�1; 1; 0) y b = (�1; 0; 1) no son paralelos, P es un plano quecontiene a P0, P1 y P2; P0 resulta de hacer u = 0, v = 0; P1 resulta de haceru = 1, v = 0; y P2 resulta de hacer u = 0, v = 1. De donde resulta que
P = f(1; 0; 0) + u(�1; 1; 0) + v(�1; 0; 1)g= f(1� u� v; u; v)g
es un plano que pasa por los puntos (1; 0; 0), (0; 1; 0) y (0; 0; 1).
Ejemplo 4 Determine la intersección de la recta L del ejemplo 2 con el planoP del ejemplo 3.
4

Figura 4: Recta que pasa por los puntos P0 y P1:
Figura 5: Plano que pasa por los puntos P0, P1 y P2:
5

Solución. Supongamos que P es un punto de la intersección de L y P. Laintersección de dos conjuntos L y P, denotada por L \ P, es el conjunto detodos los puntos que pertenecen tanto a L como a P. Si P 2 L \ P, P 2 L demodo que
P = (1; 1 + t; 2� 2t) para algún t 2 R
y P 2 P de modo que
P = (1� u� v; u; v) para ciertos u; v 2 R:
Por tanto, P pertenece a la intersección si y sólo si
(1; 1 + t; 2� 2t) = (1� u� v; u; v) para ciertos t; u; v 2 R;
es decir, si y sólo si
1 = 1� u� v1 + t = u
2� 2t = v:
Resolviendo estas ecuaciones, encontramos
t = 3; u = 4; v = �4:
Por tanto,
P = (1; 1 + t; 2� 2t) = (1; 4;�4) = (1� u� v; u; v):
Luego (1; 4;�4) es el punto de intersección.
2.2.1. Ejercicios
1. Encuentre la distancia entre los siguientes pares de puntos de R3.
a) (1; 5; 3) y (0; 0; 0)
b) (2; 1;�5) y (�1; 0; 4)c) (x1; y1; 0) y (x2; y2; 0)
d) P0 y P0 + ta
2. Determine una recta que pasa por el punto P0 paralela a a cuando:
a) P0 = (0; 0; 0) y a = (1; 1; 1)
b) P0 = (7; 12;�11) y a = (0; 0; 1)c) P0 = (�3; 2;�1) y a = (1; 5;�4)
3. Determine en cada caso una recta que pase por los pares de puntos dadosy proporciónese su ecuación paramétrica:
6

a) (0; 0; 0) y (1; 1; 1)
b) (8;�3; 2) y (5; 0; 0)c) (�3; 2;�1) y (�2; 7;�5)
4. Determine un plano que pase por los puntos dados y proporcione suecuación paramétrica:
a) (2; 3; 1), (1; 1;�4) y (�3; 4; 2)b) (1; 1; 1), (0; 0; 0) y (2; 0; 0)
c) (1; 1; 1), (3;�2; 0) y (4; 3;�1)
5. ¿Son colineales los conjuntos de puntos siguientes?
a) (0; 0; 0), (1; 1; 1) y (�1;�1;�1)b) (2; 3;�5), (0; 0; 0) y (3;�2; 0)c) (1; 2; 0), (5;�7; 8) y (4; 3;�1)
6. Encuentre la intersección de la recta L y el plano P en cada uno de loscasos siguientes:
a) L = f(1; 1; 1) + t(2; 3; 4)g, P = f(2; 3; 4) + u(1; 1; 1) + v(1; 0;�2)gb) L pasa por (0; 0; 0) y (1; 1; 1) y P pasa por (2; 3; 1), (1; 1;�4) y(�3; 4; 2)
c) L pasa por (1; 1; 1) y (�3; 2;�1) y P pasa por (2; 3; 1), (1; 1;�4) y(�3; 4; 2)
2.3. Rectas
En esta sección demostraremos que dos puntos distintos determinan in-equívocamente una recta, es decir, que hay una recta y sólo una recta que pasapor cada par de puntos distintos de R3. Antes de probar este resultado daremosun breve repaso de las operaciones entre conjuntos y su notación.Un conjunto A se dice que es un subconjunto de un conjunto B, lo que se
escribe A � B, si todo elemento de A es también un elemento de B. Decimos quedos conjuntos son iguales si y sólo si son idénticos. Así, A = B si y sólo si A � By B � A. La intersección de los conjuntos A y B, escrita A \ B, es el conjuntode todos los elementos que se encuentran tanto en A como en B, es decir, en losdos a la vez. Para que la intersección de dos conjuntos sea siempre un conjunto,es necesario introducir el conjunto nulo o conjunto vacío. El conjunto vacío esel conjunto que no tiene elementos y se denota por ?. El conjunto vacío es unsubconjunto de todo conjunto. La unión de los conjuntos A y B, escrita A[ B,es el conjunto de todos los elementos que están en A o en B.
Teorema 5 Para cada par de puntos distintos de R3 hay una y sólo una rectaque pasa por ellos.
7

Prueba. Sean P1 y P2 un par de puntos distintos de R3. Entonces
L = fP1 + t (P2 �P1)j t 2 Rg
es una recta que pasa por P1 y P2. Supongamos que
L0 = fP0 + saj s 2 Rg
es una recta que pasa por P1 y P2. Deseamos demostrar que L0 = L. ComoP1 y P2 son puntos en L0 existen números reales distintos s1 y s2 tales queP1 = P0 + s1 a y P2 = P0 + s2 a. Si P 2 L, entonces, para algún t 2 R
P = P1 + t (P2 �P1) = P0 + s1 a+t(s2 � s1)a= P0 + [s1 + t(s2 � s1)]a:
Así, P 2 L0 y L � L0. Recíprocamente, si P 2 L0, entonces para algún s 2 R
P = P0 + sa = P1 � s1 a+sa = P1 +s� s1s2 � s1
(P2 �P1):
Luego, P 2 L y L0 � L. Como L0 � L y L � L0, tenemos L0 = L.
De�nición 6 Dos rectas
L1 = fP1 + saj s 2 Rg y L2 = fP2 + tbj t 2 Rg
se dicen paralelas si los vectores a y b son paralelos.
Corolario 7 Para todo punto P1 2 R3 y toda recta L = fP0 + saj s 2 Rg, hayuna y solamente una recta que pasa por P1 paralela a L.
Prueba. L1 = fP1 + taj t 2 Rg es una recta que pasa por P1 y es paralela aL. Sea L2 = fP2 + ubju 2 Rg otra recta que pasa por P1 y es paralela a L.Como P1 2 L2, existe un número real u1 tal que
P1 = P2 + u1 b:
Además, L2 paralela a L implica que a = rb para algún r 2 R. De donde
P1 + a = P2 + u1 b+ a
= P2 + u1 b+r b
= P2 + (u1 + r)b
y P1 + a 2L1 \ L2. Como P1 y P1 + a son puntos distintos de L1 \ L2, deacuerdo con el teorema 5, L1 = L2.
Corolario 8 Si L1 = fP1 + saj s 2 Rg y L2 = fP2 + tbj t 2 Rg son rectasparalelas, entonces L1 = L2 o L1 \ L2 = ?.
8

Prueba. Supongamos que L1\L2 6= ? y sea P0 un punto de L1\L2. Entoncesexisten números reales s0 y t0 tales que
P0 = P1 + s0 a = P2 + t0 b:
Además, como L1 y L2 son paralelas, a = rb para algún r 2 R. De donde
P0 + a = P1 + s0 a+ a = P2 + t0 b+ a
, P0 + a = P1 + (s0+1)a = P2 + t0 b+rb
, P0 + a = P1 + (s0+1)a = P2 + (t0 + r)b
y P0 + a 2L1 \ L2. Como P0 y P0 + a son puntos distintos en L1 y en L2,según el teorema 5, L1 = L2.
Corolario 9 Si las rectas L1 y L2 no son paralelas, entonces L1 \ L2 = ? oconsiste en un solo punto.
Prueba. Si L1 \ L2 contiene más de un punto, entonces de acuerdo con elteorema 5, tendríamos que L1 = L2. Sin embargo L1 y L2 no son paralelas yno pueden por tanto coincidir. De esta manera, L1 \L2 no puede contener másde un punto.
Ejemplo 10 Determine si las siguientes rectas son paralelas o no y diga cuales su intersección.
L1 = f(1; 3;�2) + t(3;�6; 9)g ; L2 = f(2; 1; 7) + s(�2; 4;�6)g
Solución. Las rectas son paralelas si hay un número real r tal que
(3;�6; 9) = r(�2; 4;�6):
Es decir, si 3 = �2r, �6 = 4r y 9 = �6r. Estas ecuaciones se satifacen porr = � 3
2 , por lo que las rectas son paralelas. Como las rectas son paralelas,según el corolario 8 L1 = L2 o L1 \ L2 = ?. El punto P1 = (1; 3;�2) 2 L1. SiP1 2 L2, entonces L1 = L2 y si P1 =2 L2, entonces L1 \ L2 = ?.Si P1 2 L2, entonces para algún s 2 R,
(1; 3;�2) = (2; 1; 7) + s(�2; 4;�6)
o(1; 3;�2)� (2; 1; 7) = s(�2; 4;�6)
o(�1; 2;�9) = (�2s; 4s;�6s):
Esta última ecuación es equivalente a las tres ecuaciones:
�1 = �2s; 2 = 4s; �9 = �6s:
Como no hay un número s que satisfaga simultáneamente estas tres ecuaciones,P1 =2 L2. Así que L1 \ L2 = ?.
9

Ejemplo 11 Determine si las rectas siguientes son o no paralelas y determinesu intersección.
L1 = f(1; 3;�2) + t(3;�6; 9)g ; L2 = f(2; 1; 7) + s(1;�3; 4)g :
Solución. Las rectas son paralelas si hay un número real r tal que
(3;�6; 9) = r(1;�3; 4):
Como no hay un número r que satisfaga esta ecuación, L1 y L2 no son paralelas.Luego, por el corolario 9 L1 \ L2 = ? o L1 \ L2 contiene un solo punto. SiL1 \ L2 6= ? hay un punto P0 2 L1 \ L2. Es decir, hay números t; s 2 R talesque
P0 = (1; 3;�2) + t(3;�6; 9) = (2; 1; 7) + s(1;�3; 4)o
t(3;�6; 9)� s(1;�3; 4) = (2; 1; 7)� (1; 3;�2)o
(3t;�6t; 9t)� (s;�3s; 4s) = (1;�2; 9)o
(3t� s;�6t+ 3s; 9t� 4s) = (1;�2; 9):Esta ecuación es equivalente a las tres ecuaciones :
3t� s = 1
�6t+ 3s = �29t� 4s = 9:
Resolviendo las dos primeras ecuaciones para s y t, encontramos que s = 0 yt = 1
3 . Como estos valores no satisfacen la tercera ecuación, no hay ningunasolución para el sistema y L1 \ L2 = ?.
De�nición 12 � es un ángulo entre las rectas L1 y L2 si para ciertos vectoresno nulos a y b, L1 = fP1 + sag, L2 = fP2 + tbg, y � es el ángulo entre a yb.
Hablaremos de ángulo entre dos rectas aun en el caso de que no se intersecten.
Ejemplo 13 Encuentre un ángulo entre las dos rectas del ejemplo 11.
Solución. Sean a = (3;�6; 9) y b = (1;�3; 4). Si � es el ángulo entre a y b,entonces
cos � =a � bjaj jbj =
3 + 18 + 36
3p14p26
=57
6p91= 0;99587
y � tiene como medida en grados 5 �12 0 o 354 �48 0:A veces es conveniente expresar los vectores de V3 en términos de los vectores
unitarios (ver la �gura 6).
i = (1; 0; 0); j = (0; 0; 1); k = (0; 0; 1): (1)
10

Figura 6: u = (cos�; cos�; cos ):
Estos vectores apuntan en las direcciones positivas de los ejes X, Y y Z,respectivamente. Para cualquier vector a 2 V3, tenemos
a = (a1; a2; a3) = (a1; 0; 0) + (0; a2; 0) + (0; 0; a3)
= a1(1; 0; 0) + a2(0; 1; 0) + a3(0; 0; 1)
o bien,a = a1i+a2j+a3k: (2)
Sea a = (l;m; n) un vector no nulo paralelo a una recta L. Los números l,m, n se llaman números directores de la recta L. Sea � el ángulo entre i y a; �el ángulo entre j y a; y el ángulo entre k y a (ver la �gura 6). Los ángulos �,� y se llaman ángulos directores de L y a los cosenos cos�, cos�, y cos seles denomina cosenos directores de L. Si u es el vector unitario en la direcciónde a, entonces
u =a
jaj =(l;m; n)pl2 +m2 + n2
;
de donde se puede demostrar que
cos� = i � u; cos� = j � u; cos = k � u; (3)
u = (cos�; cos�; cos ) (4)
cos2 �+ cos2 � + cos2 = 1: (5)
Sean �1, �1 y 1 los ángulos directores de la recta L1 y sean �2, �2 y 2 losángulos directores de la recta L2. Si los ángulos de dirección de L1 y L2 están
11

determinados por los vectores a1 y a2, respectivamente, y � es el ángulo entrea1 y a2, entonces
cos � = cos�1 cos�2 + cos�1 cos�2 + cos 1 cos 2: (6)
2.3.1. Ejercicios
1. Sean
L1 = f(2; 1; 4) + r(1; 1; 1)gL2 = f(1;�1; 4) + s(2;�1; 3)gL3 = f(1;�2; 5) + t(1;�3; 4)gL4 = f(3;�2; 7) + u(6;�3; 9)gL5 = f(3; 2; 3) + v(�2;�2;�2)g :
Determine si son o no paralelas las rectas siguientes y determine su inter-sección:
a) L1 y L2b) L1 y L3c) L1 y L4d) L1 y L5e) L2 y L3f ) L2 y L4
2. Identi�que el conjunto de todos los puntos P = (x; y; z) que satisfacen
x� 32
=y + 5
3=z � 4�2 :
3. Determine:
a) Los ángulos entre una recta paralela al vector (1; 1; 1) y los ejes decoordenadas.
b) Los ángulos entre la recta que pasa por los puntos (1; 0; 1) y (0; 1; 0)y los ejes de coordenadas.
c) El ángulo entre las rectas del inciso (a) y (b).
4. Determine:
a) Las rectas que pasan por el origen con ángulos directores � = 45 �,� = 60 �:
b) Las rectas que pasan por el punto (�2; 7; 13) con ángulos directores� = � = 45 �:
12

c) Las rectas que pasan por el origen con ángulos directores � = � = :
5. Demuestre que los vectores unitarios i, j, y k satisfacen las relaciones:
a) i � i = j � j = k � k = 1b) i � j = j � k = k � i = 0
2.4. El producto vectorial
El plano P = fP0 + ua+ vbju; v 2 Rg puede describirse como el conjuntode todos los puntos P tales que P�P0 es ortogonal a un vector n donde n esortogonal tanto a a como a b. En esta sección mostraremos la manera en que unvector n puede determinarse dados los vectores a y b. Para este �n introducimosuna operación entre vectores de V3 a la que llamamos producto vectorial. Cuandose aplica a vectores a y b se produce un vector que es ortogonal tanto a a comoa b. Aparte de este uso geométrico para la descripción de un plano, el productovectorial tiene otras aplicaciones importantes en geometría y en física.
De�nición 14 El producto vectorial de dos vectores a = (a1; a2; a3) y b =(b1; b2; b3) de V3, denotado por a� b, lo que se lee "a cruz b", es el vectorde�nido por
a� b = (a2b3 � a3b2; a3b1 � a1b3; a1b2 � a2b1):
El producto vectorial a� b es un vector y como
a � (a� b) = a1(a2b3 � a3b2) + a2(a3b1 � a1b3) + a3(a1b2 � a2b1)= a1a2b3 � a1a3b2 + a2a3b1 � a2a1b3 + a3a1b2 � a3a2b1= 0
y
b � (a� b) = b1(a2b3 � a3b2) + b2(a3b1 � a1b3) + b3(a1b2 � a2b1) = 0;
a� b es ortogonal tanto a a como a b.Las propiedades fundamentales del producto vectorial son:Para cualesquiera a, b, c 2 V3 y todo r 2 R,
a� b = �b� a (7)
(ra)� b = r(a� b) (8)
a� (b+ c) = a� b+ a� c: (9)
La ecuación 7 nos dice que el producto vectorial no es conmutativo; la ecuación8 muestra la relación entre la multiplicación por un número real y el productovectorial; y la ecuación 9 nos dice que el producto vectorial es distributivo re-specto a la adición. Es fácil construir ejemplos que nos muestran que, en general,a� (b� c) 6= (a� b)� c, es decir, que la ley asociativa no se veri�ca.
13

Los vectores unitarios i = (1; 0; 0), j = (0; 1; 0), y k = (0; 0; 1) satisfacen lasrelaciones
i� i = j� j = k� k = 0i� j = k = �j� ij� k = i = �k� j (10)
k� i = j = �i� k:
Las ecuaciones 10 son fáciles de recordar. Los productos i � j = k, j � k = i,y k � i = j se corresponden con las permutaciones cíclicas de fi; j;kg, a saber,fi; j;kg, fj;k; ig y fk; i; jg. Usando las propiedades 8 y 9 y los resultados de 10,podemos obtener el producto vectorial de dos vectores cualesquiera de V3 comosigue:
a� b = (a1i+ a2j+ a3k)� (b1i+ b2j+ b3k)= a1b1(i� i) + a1b2(i� j) + a1b3(i� k) + a2b1(j� i) + a2b2(j� j)
+a2b3(j� k) + a3b1(k� i) + a3b2(k� j) + a3b3(k� k)= (a2b3 � a3b2)i+ (a3b1 � a1b3)j+(a1b2 � a2b1)k:
Una representación más conveniente del producto vectorial es mediante el usode determinantes. Escribimos:
a� b =
������i j ka1 a2 a3b1 b2 b3
������ = i���� a2 a3b2 b3
����+ j ���� a3 a1b3 b1
����+ k ���� a1 a2b1 b2
����= i (a2b3 � a3b2) + j(a3b1 � a1b3) + k(a1b2 � a2b1): (11)
Se ha señalado anteriormente que el producto vectorial a�b es ortogonal tantoa a como a b. La longitud del vector a�b tiene un signi�cado geométrico. Cal-culando el cuadrado de la longitud de a�b obtenemos, por el álgebra elemental,
ja� bj2 = (a2b3 � a3b2)2 + (a3b1 � a1b3)2 + (a1b2 � a2b1)2
= (a21 + a22 + a
23)(b
21 + b
22 + b
23)� (a1b1 + a2b2 + a3b3)2;
es decir,ja� bj2 = jaj2 jbj2 � (a � b)2 : (12)
Sabemos quea � b = jaj jbj cos �;
donde � es un ángulo entre a y b. Así, si tomamos � como el ángulo 0 � � � �entre a y b (ver �gura 7), tenemos
ja� bj2 = jaj2 jbj2 (1� cos2 �) = jaj2 jbj2 sen2 �
yja� bj = jaj jbj sen �; (13)
14

Figura 7: Una interpretación geométrica de ja� bj.
donde sen� � 0 ya que 0 � � � �. Como jbj sen � es la altura del paralelogramode lados a y b (ver la �gura 7), hemos demostrado que la longitud de a� b esel área del paralelogramo de lados a y b:La ecuación 13 sugiere el siguiente teorema.
Teorema 15 Dos vectores a;b 2 Vn son paralelos si y sólo si a� b = 0:
Prueba. a � b = 0 si y sólo si ja� bj2 = 0. De acuerdo con la ecuación 12vemos que esto es equivalente a (a �b)2 = jaj2 jbj2 o ja � bj = jaj jbj. Esta últimaigualdad es la igualdad de la desigualdad de Schwarz y ya hemos probado queen la desigualdad de Schwarz sólo se veri�ca la igualdad si a y b son paralelos.
2.4.1. Ejercicios
1. Sean a = (5;�2; 4), b = (2; 11;�1) y c = (�7; 6; 9). Calcúlese:
a) a� bb) b� ac) a� cd) a� (b+ c)e) (2a)� (3b)f ) ja� bjg) a � (b� c)h) (a� b) � (a� c)
15

i) a � (a� b)j ) a� (a� b)k) a� (b� c)l) (a+ b)� (a� c)
2. Demuestre la identidad:
a� (b� c) = (a � c)b� (a � b)c:
3. Utilizando la identidad del inciso 2 y el teorema 15, pruebe que: a ortogonaltanto a b como a c implica a paralelo a b� c.
4. Determine los vectores no nulos ortogonales a:
a) (1; 0; 0) y (0; 1; 0)
b) (2;�3; 4) y (�1; 5; 7)c) (2; 6;�4) y (3; 9;�6)
5. Pruebe 7, 8 y 9.
6. Usando la ecuación 10 encuentre i� (i� j) e (i� i)� j para demostrar conello que la ley asociativa no se veri�ca para el producto vectorial.
7. Demuestre que: a = (a1; a2) y b = (b1; b2) son paralelos si y sólo si���� a1 a2b1 b2
���� = a1b2 � a2b1 = 0:8. Calcule el área del paralelogramo de lados:
a) (5; 3; 0) y (3; 7; 0)
b) i� j+ 5k y 2i+ 4j� 8kc) (4; 13;�11) y (8;�10; 21)d) 2i+ 3j+ 5k y i� 2k
9. Calcule el área de los triángulos con vértices:
a) (0; 0; 0), (1; 0; 0), (3; 8; 0)
b) 5i� 4j, 12k� 5j, 8i+ 7jc) (0; 0; 0), (1; 0; 1), (0; 1; 1)
16

2.5. El triple producto escalar
Dados tres vectores cualesquiera a, b, y c en V3, entonces como b� c es unvector, podemos formar el producto escalar de a con b� c. A este producto lellamamos "triple producto escalar".
De�nición 16 Dados tres vectores a, b, y c en V3, el triple producto escalarde a, b, y c, denotado por [abc], se de�ne por
[abc] = a � (b� c):
Observe que expresiones tales como (a �b)� c) no tienen signi�cado alguno,ya que a � b es un número real y el producto vectorial es una operación entrepares de vectores en V3.El triple producto escalar [abc] puede expresarse simplemente en términos
de un determinante 3� 3:
[abc] = a � (b� c) = (a1; a2; a3) � (b2c3 � b3c2; b3c1 � b1c3; b1c2 � b2c1)
= a1
���� b2 b3c2 c3
����+ a2 ���� b3 b1c3 c1
����+ a3 ���� b1 b2c1 c2
����=
������a1 a2 a3b1 b2 b3c1 c2 c3
������ :Mediante cálculo directo puede demostrarse que
[abc] = a � (b� c) = b � (c� a) = c � (a� b): (14)
Como el producto escalar es conmutativo, la ecuación 14 puede reformularsecomo
[abc] = (b� c) � a =(c� a) � b =(a� b) � c: (15)
Esta última expresión muestra que el triple producto escalar no cambia porpermutaciones cíclicas de los vectores:
[abc] = [bca] = [cab]
y de la ecuación 15 se deduce que para expresar [abc] podemos colocar el puntoy la cruz en cualquiera de las dos posiciones: [abc] = a � (b� c) =(a� b) � c.El triple producto escalar puede usarse para describir la orientación de R3.
Si a, b, y c son tres vectores mutuamente ortogonales y [abc] > 0, entoncesdecimos que a, b, y c es una terna positivamente orientada. Por ejemplo, lostres vectores unitarios i, j, y k forman una terna positivamente orientada, yaque
[ijk] = i � (j� k) = i � i = 1 > 0:Ya hemos admitido que i, j, y k forman un sistema levógiro. Así, esto implicaque la orientación levógira tiene una orientación positiva. Luego, si a, b, y cforman una terna positivamente orientada de vectores mutuamente ortogonales,
17

Figura 8: Terna positivamente orientada.
entonces la rotación de b a c de un ángulo igual a �=2 es contraria al giro delas manecillas del reloj cuando se ve desde a.La noción de una terna orientada puede extenderse a cualesquiera tres vec-
tores a, b, y c no necesariamente ortogonales: a, b, y c constituyen una ternapositivamente orientada si [abc] > 0. Consideremos ahora la terna b � c, b, cdonde b y c no son paralelos. Entonces
[(b� c)bc] = (b� c) � (b� c) = jb� cj2 > 0:
Como hemos supuesto que la orientación levógira es la orientación positiva,tenemos que el giro de un ángulo � de b a c donde 0 < � < � es contrario algiro de las manecillas del reloj cuando se ve desde b� c (ver �gura 8).Para obtener una interpretación geométrica de una terna arbitraria positi-
vamente orientada a, b, y c construimos a, b, y c con el mismo punto inicialP0 (ver �gura 8) y denominamos P al plano que pasa por P0 determinado porb, y c. Como
[abc] = a � (b� c) = jb� cjComp(b�c) a;
vemos que la orientación positiva implica que Comp(b�c) a > 0, y por tanto,que Proy(b�c) a y b� c apuntan en la misma dirección. Es decir, si a, b, y cforman una terna positivamente orientada, a y b� c se encuentran en el mismolado del plano P.Si la terna de vectores a, b y c está positivamente orientada, entonces [abc]
es el volumen del paralelepípedo de lados a, b y c (ver �gura 9). El volumen deun paralelepípedo es el área de la base por la altura. La base es un paralelogramode lados b y c y, por tanto, su área es jb� cj. Ahora, la altura es Comp(b�c) a,luego
Volumen = jb� cjComp(b�c) a = a � (b� c) = [abc] :
18

Figura 9: Volumen de un paralelepípedo.
Si [abc] < 0, entonces � [abc] es el volumen del paralelepípedo de lados a,b y c.
Ejemplo 17 Encuentre el volumen del paralelepípedo de lados a = (2; 3;�1),b = (3;�7; 5), y c = (1;�5; 2).
Solución. Como
[abc] = a � (b� c) =
������2 3 �13 �7 51 �5 2
������ = 27;el volumen del paralelepípedo es 27.
Ejemplo 18 Encuentre el volumen del tetraedro de lados a = (2; 3;�1), b =(3;�7; 5), y c = (1;�5; 2).
Solución. El volumen de un tetraedro es un tercio del área de la base por laaltura. La base es un triángulo con lados b y c y su área es exactamente lamitad del área del paralelogramo de lados b y c. De donde el área de la base es12 jb� cj y el volumen del tetraedro es
V = 13 (área de la base)(altura)
= 13
�12 jb� cj
�(Compb a)
= 16 [abc] :
Así, del ejemplo anterior, V = 16 (27) =
92 .
19

2.5.1. Ejercicios
1. Demuestre que:
a) a� a = 0b) a � (b� c) = b � (c� a) = c � (a� b)c) a � (b� c) = �b � (a� c)d) a � (a� b) = 0
2. Determine los volúmenes de los paralelepípedos de aristas:
a) 3i, 4j, 8k
b) (2;�3; 4), (1; 1; 1), (1;�4; 7)c) (2; 6;�4), (3; 2; 7), (2; 4; 3)d) 3i+ 4k, i+ k, 2j+ 4k
3. Determine los volúmenes de los tetraedros de aristas:
a) (2; 2; 4), (1; 5; 2), (1; 0; 1)
b) (5; 0; 16), (1;�1; 1), (8; 2; 3)c) (2; 6;�4), (1; 1; 1), (1;�4; 3)
2.6. Independencia lineal de vectores
De�nición 19 Un conjunto fa1; : : : ;akg de k vectores en Vn se dice que eslinealmente independiente si
r1a1 + � � �+ rkak = 0 (ri 2 R)
implica r1 = � � � = rk = 0. Si fa1; : : : ;akg no es linealmente independiente sedice que es linealmente dependiente.
Un conjunto k de vectores fa1; : : : ;akg es linealmente dependiente si y sólosi hay k números reales r1, : : :,rk no todos iguales a cero, tales que
r1a1 + � � �+ rkak = 0:
La expresión r1a1+� � �+rkak donde r1, : : :,rk 2 R se denomina una combinaciónlineal de los vectores a1; : : : ;ak.Con frecuencia nos permitimos ciertas libertades de lenguaje y en lugar de
decir que el conjunto de vectores fa1; : : : ;akg es linealmente independiente (odependiente), decimos que los vectores a1; : : : ;ak son linealmente independientes(o linealmente dependientes).Si dos vectores a y b son linealmente dependientes, entonces hay dos números
s, t, que no son ambos iguales a cero, tales que
sa+ tb = 0:
20

Si s 6= 0, entonces a = � tsb mientras que si t 6= 0, entonces b = � s
ta. Encualquier caso, vemos que la dependencia lineal de dos vectores a y b implicaque a y b son vectores paralelos. Recíprocamente, si a y b son vectores paralelos(a = rb), entonces son linealmente dependientes (1a � rb = 0). Luego, ladependencia lineal de dos vectores es equivalente a que los dos vectores seanparalelos.Si tres vectores a, b y c de V3 son linealmente dependientes, entonces hay
tres números r, s, t no todos iguales a cero, tales que
ra+ sb+ tc = 0:
Si r 6= 0, entonces a = � srb �
trc y a es una combinación lineal de b y c.
Si b y c no son paralelos (son linealmente independientes), entonces b y cdeterminan un plano P que pasa por un punto dado P0 2 R3 y a es tambiénparalelo a P. (Decimos que un vector a es paralelo a un plano P si para cualquierpunto P0 2 P la recta fP0 + tag � P.) Si b y c son paralelos (son linealmentedependientes), entonces a es también paralelo a b y c, por lo que hay muchosplanos por cualquier punto P0 2 R3 a los que a, b y c son paralelos.Análogamente, si s 6= 0, entonces b es una combinación lineal de a y c, y
si t 6= 0, entonces c es una combinación lineal de a y b. En cualquiera de loscasos, hay al menos un plano P por cualquiera de los puntos P0 2 R3 tal quea, b y c son paralelos a P. Recíprocamente, si tres vectores son paralelos a unmismo plano, puede demostrarse que son linealmente dependientes. De dondela dependencia lineal de tres vectores es equivalente a que los tres vectores seanparalelos a un mismo plano.Posteriormente, en la sección 2.10 demostraremos que cualquier conjunto de
más de tres vectores en V3 es linealmente dependiente.Si algún subconjunto de un conjunto de k vectores es linealmente dependi-
ente, entonces el conjunto total de k vectores es linealmente dependiente.Supongamos que
r1a1 + � � �+ rjaj = 0 (j � k) (16)
con no todos los ri iguales a cero y consideremos la ecuación
r1a1 + � � �+ rjaj + rj+1aj+1 + � � �+ rkak = 0: (17)
Deseamos demostrar que es posible escoger coe�cientes r1; : : : ; rk no todos cero,tales que la ecuación 17 se veri�que. Podemos escoger r1; : : : ; rj , no todos cero,tales que la ecuación 16 se veri�que, y escoger rj+1 = � � � = rk = 0. Entonces,tenemos que los coe�cientes r1; : : : ; rk de la ecuación 17 no todos son cero, ypor tanto, el conjunto fa1; : : : ;aj ;aj+1; : : : ;akg es linealmente dependiente.Cualquier conjunto de vectores que contiene el vector cero es linealmente
dependiente, pues podemos escoger coe�cientes no todos cero tales que la corre-spondiente combinación lineal sea igual al vector cero. En particular, podemostomar todos los coe�cientes de los vectores que no son el vector cero iguales acero y tomar el número uno como el coe�ciente del vector cero.
21

Ahora comprobaremos que el triple producto escalar proporciona un medioconveniente para comprobar la dependencia o independencia lineal de tres vec-tores en V3. Como hemos señalado antes, el valor absoluto de [abc] es el volumende un paralelepípedo con aristas a, b y c y es claro, geométricamente, que estevolumen es cero si y solo si a, b y c son paralelos a algún plano. Por otra parte,que tres vectores sean paralelos a un plano es equivalente a la dependencia linealde los tres vectores.
Teorema 20 Tres vectores a, b y c 2 V3 son linealmente dependientes si y sólosi [abc] = a � (b� c) = 0.
Prueba. Probamos primero que a, b y c linealmente dependientes implica[abc] = 0. Si b y c son linealmente dependientes, entonces a, b y c sonlinealmente dependientes. Entonces, por el teorema 15 b� c = 0 y [abc] =a � (b� c) = a � 0 = 0. Si b y c son linealmente independientes mientras que a,b y c son linealmente dependientes, entonces
a = sb+ tc para algunos s; t 2 R:
De donde, como tanto b como c son ambos ortogonales a b� c,
[abc] = a � (b� c) = (sb+ tc) � (b� c)= s(b�(b� c)) + t(c � (b� c)) = 0:
Recíprocamente, supongamos que [abc] = 0. Entonces el vector b� c esortogonal a a, puesto que a � (b� c) = 0. Además, b� c es ortogonal a b.Por tanto, de acuerdo al ejercicio 3 de la página 16, b� c es paralelo a a� b.Consideramos dos casos:Caso 1. Si a� b = 0, entonces a y b son linealmente dependientes y, por
tanto, a, b y c son linealmente dependientes.Caso 2. Si a� b 6= 0, entonces para algún r 2 R
b� c = r(a� b):
De donde, reordenando, tenemos
b� c+ r(b� a) = 0;
o bien,b� (c+ ra) = 0:
Por tanto, b y c+ ra son paralelos. Pero b 6= 0 y, por tanto, para algún s 2 R
c+ ra = sb:
Lo que demuestra que a, b y c son linealmente dependientes.
Ejemplo 21 ¿Son los vectores a = (1; 2;�2), b = (0; 3; 1) y c = (�1; 1; 3)linealmente dependientes?
22

Solución. Como
[abc] =
������1 2 �20 3 1�1 1 3
������= 1
���� 3 11 3
����+ 2 ���� 1 03 �1
����� 2 ���� 0 3�1 1
����= 1(9� 1) + 2(�1� 0)� 2(0 + 3) = 0;
los vectores son linealmente dependientes. Realmente, a = b� c.
2.6.1. Ejercicios
1. Determine la dependencia o independencia lineal de los siguientes vectores:
a) (2; 5;�1), (3;�7; 0), (0; 29;�3)b) (12; 52;�9), (2; 6;�1), (1;�5; 2)c) (3;�7; 5), (6;�5; 2), (1;�1;�1)
2. Demuestre que si a, b y c son linealmente dependientes mientras que by c son linealmente independientes, entonces hay números reales s; t talesque a = sb+ tc.
3. Demuestre que el sistema homogéneo
a1x+ b1y + c1z = 0
a2x+ b2y + c2z = 0
a3x+ b3y + c3z = 0
tiene soluciones no triviales [es decir, (x; y; x) 6= (0; 0; 0)] si y sólo si������a1 b1 c1a2 b2 c2a3 b3 c3
������ = 0:Sugerencia: El sistema de ecuaciones es equivalente a la ecuación vectorialxa+ yb+ zc = 0. Utilice el teorema 20 y que������
a1 b1 c1a2 b2 c2a3 b3 c3
������ =������a1 a2 a3b1 b2 b3c1 c2 c3
������ :4. Demuestre que si a1; : : : ;ak son linealmente independientes, entonces
r1a1 + � � �+ rkak = s1a1 + � � �+ skak
implica r1 = s1; : : : ; rk = sk:
23

Figura 10: Ecuación del plano.
5. Demuestre que k vectores son linealmente dependientes si y sólo si uno delos vectores es una combinación lineal de los otros.
6. Establezca las siguientes identidades:
a) (a+ b) � [(a� c)� (a+ b)] = 0b) a� [a� (a� b)] = (a � a)(b� a)c) (a� b)� (c� d) = [(a� b) � d] c� [(a� b) � c]dd) (a� b) � (c� d) = (a � c)(b � d)� (a � d)(b � c)
2.7. La ecuación del plano
Consideremos el plano (ver �gura 10)
P = fP0 + ua+ vbju; v 2 Rg : (18)
P es el plano que pasa por P0 determinado por el par de vectores no paralelosa y b. Cualquier vector no nulo ortogonal a a y b se llama vector normal a P (osimplemente, una normal a P). Así, a� b es un vector normal a P y cualquierotro vector normal es paralelo a a� b.
Lema 22 Si n es un vector normal al plano P = fP0 + ua+ vbju; v 2 Rg yP1;P2 2 P entonces n, es ortogonal a P2 �P1.
Prueba. P1;P2 2 P implica
P1 = P0 + u1a+ v1b y P2 = P0 + u2a+ v2b
para algunos u1; v1; u2; v2 2 R. Por tanto,
P2 �P1 = (u2 � u1)a+ (v2 � v1)b:
24

Como n es ortogonal tanto a a como a b, es claro que
n � (P2 �P1) = 0:
Esto completa la prueba.
Lema 23 Si n es un vector normal al plano P = fP0 + ua+ vbju; v 2 Rg yP�P0 es ortogonal a n, entonces P 2P.
Prueba. Como n = r(a� b) y r 6= 0, P�P0 ortogonal a n implica
(P�P0) � (a� b) = 0:
De acuerdo con el teorema 20 (página 22), esto implica que P�P0, a y b son lin-ealmente dependientes. Como a y b son linealmente independientes, concluimosque existen u; v 2 R tales que
P�P0 = ua+ vb:
Por tanto, P = P0 + ua+ vb y P 2P.De los lemas 22 y 23 se deduce el siguiente teorema.
Teorema 24 Si n es un vector normal al plano
P = fP0 + ua+ vbju; v 2 Rg
entoncesP = fPjn � (P�P0) = 0g
y P es el único plano que pasa por P0 con vector normal n.
Prueba. Sea S = fPjn � (P�P0) = 0g. Deseamos demostrar que S = P.Según el lema 22, si P 2 P, entonces P�P0 es ortogonal a n y n � (P�P0) = 0:De donde P 2 P implica P 2 S de modo que P � S. Recíprocamente, si P 2 Sentonces P�P0 es ortogonal a n y según el lema 23 P 2 P. Por tanto, S � P.Luego S = P.Para demostrar que P es el único plano que pasa por P0 con vector normal
n, supongamos queP 0 = fP00 + sc+ tdj s; t 2 Rg
es otro plano que pasa por P0 y tiene también a n como vector normal . Entonces
P 0 = fPjn � (P�P00) = 0g :
Como P0 2 P 0, n � (P0 �P00) = 0 o, lo que es lo mismo, n �P0 = n �P00. Dedonde n � (P�P0) = n � (P�P00) para todo P 2 R3 y en particular
P 0 = fPjn � (P�P00) = 0g = fPjn � (P�P0) = 0g = P:
Esto completa la prueba.
25

La ecuaciónn � (P�P0) = 0 (19)
se llama ecuación vectorial del plano P.Hemos demostrado que si P es un plano que pasa por P0 y tiene a n como
vector normal, entonces n � (P�P0) = 0 es una ecuación vectorial de P. Recíp-rocamente, ahora demostraremos que toda ecuación vectorial n � (P�P0) = 0(n 6= 0) es la ecuación vectorial de un plano que pasa por P0.
Teorema 25 Para todo vector n distinto de cero y todo punto P0, n�(P�P0) =0 es una ecuación vectorial de un plano que pasa por P0 y tiene a n como vectornormal.
Prueba. Deseamos demostrar que
S = fPjn � (P�P0) = 0g
es un plano que pasa por P0 y tiene a n como vector normal. Necesitamosdemostrar tan solo que existen vectores linealmente independientes a y b ambosortogonales a n. Entonces, n es un vector normal al plano
P = fP0 + ua+ vbju; v 2 Rg
y, por el teorema 24, S = P.Sea n = (n1; n2; n3). Como n 6= 0, al menos uno de sus componentes es
distinto de cero. Supongamos que n1 6= 0. Entonces
a = (�n2; n1; 0)
es un vector distinto de cero ortogonal a n. Como a y n son vectores ortogonalesdistintos de cero, son linealmente independientes. Entonces, b = n � a es unvector distinto de cero ortogonal a n y a a. Luego, a y b son vectores linealmenteindependientes cada uno de los cuales es ortogonal a n. Esto completa la prueba.
Corolario 26 Toda ecuación vectorial n � P = d (n 6= 0) es una ecuación deun plano que tiene a n como vector normal.
Prueba. Si la ecuación n �P = d tiene una solución P0, entonces n �P0 = d. Dedonde n �P = d = n �P0 es equivalente a n � (P�P0) = 0, y sabemos que estaes una ecuación de un plano. Queda por probar que la ecuación n �P = d tieneuna solución. Sea n = (a; b; c). Como n 6= 0, al menos uno de sus componenteses distinto de cero. Deseamos encontrar un punto P = (x; y; z) que satisfaga a
ax+ by + cz = d:
Claramente, como al menos uno de los números a; b; c es distinto de cero, laecuación tiene soluciones; por ejemplo, (d=a; 0; 0) si a 6= 0, (0; d=b; 0) si b 6= 0, o(0; 0; d=c) si c 6= 0. Esto completa la prueba.
26

Como en la prueba anterior, sea n = (a; b; c) 6= 0 y P = (x; y; z). Entonces
n �P = ax+ by + cz;
y escrita en términos de componentes la ecuación vectorial n � P = d toma laforma
ax+ by + cz = d: (20)
Así, el conjunto P = f (x; y; z)j ax+ by + cz = dg de todas las soluciones a 20es un plano con normal n = (a; b; c); la ecuación 20 se denomina ecuación linealdel plano P. Luego, toda ecuación lineal en x; y; z es la ecuación de un plano.
Ejemplo 27 Identi�que cada uno de los siguientes planos:
1. 3(x� 5)� 2(y + 4) + 4(z � 2) = 0
2. 2x+ 3y = 2
3. x� 2y + z = 0:
Solución. Un plano queda inequívocamente determinado por una normal n yun punto P0 del plano, así que n y P0 identi�can un plano.
1. n = (3;�2; 4), P0 = (5;�4; 2):
2. n = (2; 3; 0), P0 = (1; 0; 0):
3. n = i� 2j+ k, y el plano pasa por el origen.
Ejemplo 28 Determine la recta que pasa por el punto (1;�5; 6) paralela a lanormal al plano que contiene a los puntos (0; 1; 2), (3; 2; 6) y (�2; 0; 5):
Solución. Sea a = (3; 2; 6) � (0; 1; 2) = (3; 1; 4) y b = (�2; 0; 5) � (0; 1; 2) =(�2;�1; 3), n = a� b es una normal al plano P. Luego
n =
������i j k3 1 4�2 �1 3
������ = 7i� 17j� k = (7;�17;�1):De donde L = f(1;�5; 6) + t(7;�17;�1)g = f(1 + 7t;�5� 17t; 6� t)g es larecta.
Teorema 29 Tres puntos no colineales determinan un plano único.
Prueba. Sean P0, P1 y P2 tres puntos no colineales. Entonces P1 � P0 yP2 �P0 son linealmente independientes. Luego,
P = fP0 + u(P1 �P0) + v(P2 �P0)g
es un plano que pasa por los puntos P0, P1 y P2 (lema 22 y ejercicio 3, página16). Luego, de acuerdo con el teorema 24, P es el único plano que pasa por lospuntos no colineales P0, P1 y P2.
27

2.7.1. Ejercicios
1. Determine una normal a cada uno de los siguientes planos.
a) El plano cuyas ecuaciones paramétricas son
x = 2� 3t+ sy = 8t+ 7s
z = �4 + 3s:
b) El planoP = f (6; t; s� t)j t 2 Rg :
c) El plano
P = f (6� u+ 3v; 8 + 2u+ 3v;�1 + v)ju; v 2 Rg :
d) El plano que pasa por los puntos (1; 0; 0), (0; 1; 0) y (0; 0; 1):
e) El plano que pasa por los puntos (2;�1; 3), (11;�13; 6) y (5; 5; 5):
2. Determine una ecuación para cada uno de los siguientes planos:
a) El plano que pasa por el origen con normal (1; 1; 1):
b) El plano que pasa por el punto (0; 0; a) con normal paralela al eje Z.
c) El plano que pasa por el punto (1;�4; 3) con normal paralela a larecta que pasa por (2;�1; 3) y (4; 8; 0).
d) El plano que contiene la recta L = f(1; 2 + 3t; 2 + t)g y el punto(2;�3; 8):
3. Proporcione una ecuación para cada uno de los planos del problema 1.
4. Identi�que el plano cuya ecuación es:
a) 3x� 5y + z = 0b) 3(x� 2) + 5(y + 3)� 8z = 0c) z = 6
d) 2x+ 3y � 8z = 13e) 5x� 7y + 12z = �8:
28

2.8. Intersección de planos
Discutiremos el problema de la determinación de la intersección de dosplanos. El carácter de esta intersección depende de que los planos sean o noparalelos.
De�nición 30 Se dice que dos planos son paralelos si sus normales son parale-las.
Si dos planos paralelos P1 y P2 tienen normales n1 y n2, respectivamente,entonces n1 y n2 son vectores paralelos no nulos. Ahora bien, como cualquiervector no nulo paralelo a n1 es normal a P1, n2 es también un vector normal aP1. Análogamente, n1 es un vector normal a P2. Es decir, toda normal a uno delos planos de un par de planos paralelos es una normal común a los dos planos.Ahora probaremos que planos paralelos o coinciden o no tienen puntos en
común y que planos no paralelos se intersectan en una recta.
Teorema 31 Si P1 y P2 son planos paralelos, entonces P1 = P2 o bien P1 \P2 = ?. Si P1 y P2 no son paralelos, entonces P1 \ P2 es una recta.
Prueba. Sean P1 = fP1 + ua+ vbju; v 2 Rg y P2 = fPj (P�P2) � n = 0g :Un punto P = P1 + ua+ vb en P1 se encuentra también en P2 si y sólo si
(P1 + ua+ vb�P2) � n = 0
o(a � n)u+ (b � n)v = (P2 �P1) � n: (21)
Si los planos P1 y P2 son paralelos, entonces a �n = 0 y b �n = 0. En este caso obien ningún par de números u; v 2 R satisface la ecuación 21, o bien cualquierpar de números u; v 2 R la satisfacen, según que (P2 � P1) � n sea distinto decero o sea igual a cero. Si (P2 � P1) � n 6= 0, entonces no hay números u; vque satisfagan la ecuación 21 y P1 \ P2 = ?. Si (P2 � P1) � n = 0, entoncescualesquiera par de números u; v satisfacen la ecuación 21 y P1 � P2. De loque se sigue que P1 = P2 ya que tres puntos no colineales determinan un planoúnico (teorema 29).Si P1 y P2 no son paralelos, entonces a �n 6= 0 o b �n 6= 0. Supongamos que
a � n 6= 0. Entonces la ecuación 21 puede resolverse para u en términos de v ypara cada v 2 R tenemos
u =(P2 �P1) � n�(b � n)v
a � n : (22)
Así, un punto P = P1+ua+ vb está en P1 \P2 si y sólo si u está determinadapor 22. Es decir,
P1 \ P2 =�P1 +
(P2 �P1) � na � n a+
�b� b � n
a � na�v
���� v 2 R�y este conjunto es una recta, ya que a y b no paralelos implica b� b � n
a � na 6= 0.
29

Ejemplo 32 Encuentre la intersección del plano
P1 = f (1; 1; 1) + u(2;�1; 3) + v(�1; 0; 2)ju; v 2 Rg
y el plano P2 cuya ecuación es
2x+ 3y � z = 7:
Solución. Un punto
P = (1; 1; 1) + u(2;�1; 3) + v(�1; 0; 2) = (1 + 2u� v; 1� u; 1 + 3u+ 2v)
en P1 se encuentra también en P2 si y sólo si
P � n = (1 + 2u� v; 1� u; 1 + 3u+ 2v) � (2; 3;�1) = 7
o bien4� 2u� 4v = 7:
Luegou = �2v � 3
2
y
P = (1; 1; 1)� 32 (2;�1; 3)� 2v(2;�1; 3) + v(�1; 0; 2)
= (�2; 52 ;�72 ) + v(�5; 2;�4):
La intersección de P1 y P2 es la recta
P1 \ P2 =�(�2; 52 ;�
72 ) + v(�5; 2;�4)
�� v 2 R :Si dos planos están dados en forma de ecuación, entonces podemos encontrar
la intersección expresando dos de las incógnitas en términos de una tercera. Latercera incógnita pasa entonces a desempeñar el papel de parámetro en la rectade intersección.
Ejemplo 33 Encuentre los puntos de intersección de los planos 4x+3y+z = 0y x+ y � z = 15.
Solución. �4x+ 3y + z = 0x+ y � z = 15
,�
x = �y + z + 15�4y + 4z + 60 + 3y + z = 0
,�x = �y + z + 15y = 5z + 60
,�x = �5z � 60 + z + 15
y = 5z + 60
,�x = �4z � 45y = 5z + 60:
30

Por tanto, los dos planos se intersectan a lo largo de la recta cuyas ecuacionesparamétricas son:
x = �4t� 45y = 5t+ 60
z = t:
COMPROBACIÓN.
4(�4t� 45) + 3(5t+ 60) + t = 0
(�4t� 45) + (5t+ 60)� t = 15:
De�nición 34 Un ángulo entre dos planos es un ángulo entre sus normales.
Ejemplo 35 Encuentre un ángulo entre los dos planos del ejemplo 33.
Solución. Los planos 4x + 3y + z = 0 y x + y � z = 15 tienen normalesn1 = (4; 3; 1) y n2 = (1; 1;�1), respectivamente. Por tanto, si � es un ánguloentre los dos planos, entonces
cos � =n1 � n2jn1j jn2j
=4(1) + 3(1) + 1(�1)p16 + 9 + 1
p1 + 1 + 1
=6p26p3= 0;6794
y � = 47 �12 0 o 312 �48 0.
2.8.1. Ejercicios
1. Determine la intersección de los planos:
a)7x+ 2y � 8z = 0
y + z = 0
b)12x� 5y + 7z = 139x+ y � 3z = 5
c)x+ y + z = 1x� y + z = 0x+ y � z = 1
2. Determine los ángulo entre los planos 1a y 1b.
3. Determine el ángulo entre el plano que pasa por los puntos (1; 0; 0), (0; 1; 0),(0; 0; 1) y el plano cuya ecuación es 3x� 5y + z = 8:
31

2.9. Intersección de una recta y un plano
Introducimos el concepto de recta paralela a un plano.
De�nición 36 Una recta L es paralela a un plano P si L es ortogonal a unanormal a P.
Teorema 37 Si la recta L es paralela al plano P, entonces L � P o L \ P = ?.Si la recta L no es paralela al plano P, entonces L \ P contiene un punto.
Prueba. Sean L = fP1 + taj t 2 Rg y P = fPjP � n = dg. Un punto P = P1+ta en L también se encuentra en P si y sólo si
(P1 + ta) � n = d
o(a � n)t = d�P1 � n: (23)
Si L es paralela a P, entonces a y n son ortogonales y a �n = 0. En este casoy según que d � P1 � n sea distinto de cero o cero, respectivamente, o ningúnnúmero t satisface la ecuación 23 o cualquier número t satisface la ecuación 23.Si d�P1 � n 6= 0, entonces ningún t 2 R satisface la ecuación 23 y L \ P = ?.Si d�P1 � n = 0, entonces toda t 2 R satisface la ecuación 23 y L � P.Si L no es paralela a P, entonces a y n no son ortogonales y a � n 6= 0. En
este caso la ecuación 23 tiene la solución única
t =d�P1 � na � n
y el punto de intersección es
P1 +d�P1 � na � n a:
Ejemplo 38 Encuentre la intersección de la recta
L = f (1; 1; 1) + t(2;�1; 3)j t 2 Rg
y el plano cuya ecuación es
2x+ 3y � z = 7:
Solución. Un punto P = (1; 1; 1) + t(2;�1; 3) en L también se encuentra en Psi y sólo si
P � n = (1 + 2t; 1� t; 1 + 3t) � (2; 3;�1) = 7o bien
4� 2t = 7:Así pues, t = � 3
2 y el punto de intersección es
(1; 1; 1)� 32 (2;�1; 3) = (�2;
52 ;�
72 ):
32

De�nición 39 La distancia de un punto Q a un plano P es la distancia de Qal punto de intersección con P de la recta que pasa por Q y es normal a P.
Ejemplo 40 Encuentre la distancia de un punto Q a un plano P.
Solución. Sea n �P = d una ecuación de P. La recta L que pasa por Q normala P tiene la ecuación
P = Q+ tn:
De acuerdo con el teorema 37, el punto de intersección de P y L es
P1 = Q+ t1 n = Q+d� n �Qn � n n
y la distancia es
d(Q;P) =����d� n �Qn � n n
���� = jd� n �Qjjnj : (24)
Si P0 2 P, entonces d = n �P0 y podemos expresar la distancia en la forma
d(Q;P) = jn � (Q�P0)jjnj = jProyn(Q�P0)j : (25)
Ejemplo 41 Encuentre la distancia del punto Q = (1;�2; 4) al plano P conecuación 2x� y + 3z = 10:
Solución. Como n = (2;�1; 3) es una normal al plano P, usando la ecuación24, tenemos
d(Q;P) =jd� n �Qj
jnj
=j10� (2;�1; 3) � (1;�2; 4)j
j(2;�1; 3)j
=j10� 16jp4 + 1 + 9
=6p14:
También podemos utilizar la ecuación 25, con n = (2;�1; 3). Sea P0 un puntodel plano y sea a = Q�P0. Entonces
d(Q;P) = jProyn aj =����a � njnj
���� = Q � n�P0 � njnj
=j(1;�2; 4) � (2;�1; 3)� 10jp
14=
6p14:
33

2.9.1. Ejercicios
1. Determine en cada caso la intersección de L y P y diga si L es o no paralelaa P.
a) L = f(2; 1; 4) + t(1; 1; 1)g, P = f(2; 0; 4) + u(1; 7; 3) + v(�3; 8; 0)gb) L = f(1;�1; 4) + t(2;�1; 3)g, P = f(6; u; v � u)gc) L = f(3; 8;�1) + t(1; 7; 1)g, P = f(6� u+ 3v; 8 + 2u+ 3v;�1 + v)gd) L = f(3;�2; 7) + t(2;�1; 3)g, P es el plano que pasa por los puntos
(2;�1; 3), (5;�5; 4), (5; 5; 8)e) L = f(3; 2; 3) + t(�2;�2;�2)g, P es el plano que pasa por el origencon normal (1; 1; 1)
2. Encuentre en cada caso la recta L que pasa por el punto Q y es ortogonalal plano P.
a) Q = (1; 2; 3), P = f(2; 1;�1) + u(1; 1; 1) + v(�1; 1; 0)gb) Q = (0; 2;�2), P pasa por (2; 1;�1), (3; 1; 0), (4;�6; 2)c) Q = (1;�1; 4), P es el plano cuya ecuación es: 2x+ y + z = 5:
3. Encuentre la distancia del punto Q al plano P en cada uno de los incisosdel problema 2.
4. Encuentre la intersección de la recta
L = f(3; 1; 3) + t(1; 1;�1)g
con cada uno de los planos de coordenadas.
5. Determine el punto donde la recta L que pasa por el punto (1; 3; 1) y esortogonal al plano P: 3x� 2y + 5z = 15 intersecta a P.
6. Demuestre que los planos
P1= f(2; 0; 4) + u(1; 7; 3) + v(�3; 8; 0)g
yP2= f(3; 2; 3) + s(4;�1; 3) + t(9; 5; 9)g
son paralelos. Encuentre la distancia entre P1 y P2 si de�nimos la distanciaentre planos paralelos como la distancia de un punto cualquiera de unplano al otro plano.
7. Sea L la intersección de los planos con ecuaciones: 3x + y � 4z = 5 y2x+ 3y � z = 4. Si P es el plano con ecuación x� 2y + 3z = 1 encuentreL \ P.
34

2.10. Bases
Hemos visto que cualquier vector a 2 V3 puede expresarse en una formaúnica como una combinación lineal de los vectores unitarios
i = (1; 0; 0), j = (0; 1; 0), k = (0; 0; 1):
En realidad,a = (a1; a2; a3) = a1i+ a2j+ a3k:
Así, los vectores i, j, k tienen la propiedad de que todo vector de V3 puedeexpresarse como una combinación lineal de estos vectores unitarios. El conjuntode vectores i, j, k no es el único conjunto de vectores que tiene esta propiedad.Demostraremos que cualesquiera tres vectores linealmente independientes tienenesta propiedad.
Teorema 42 Si a, b, c 2 V3 son linealmente independientes, entonces paracada punto P 2 R3 existen números reales únicos u; v; t tales que
P = ua+ vb+ tc:
Prueba. De acuerdo con el ejercicio 4, página 23, como a, b, c son linealmenteindependientes, si existen números u; v; t que satisfacen
P = ua+ vb+ tc;
tales números son únicos. Que tales números existan es una consecuencia delteorema 37. Sea P = fua+ vbg y L = fP+ tcg. Como como a, b, c sonlinealmente independientes, L no es paralela a P. Luego, si P1 es el punto deintersección de P y L hay números u; v; t1 2 R tales que
P1 = ua+ vb = P+ t1c:
Por tanto,P = ua+ vb+ tc
donde t = �t1.Como consecuencia del teorema 42, vemos que cualquier conjunto de cuatro
o más vectores en V3 es linealmente dependiente.
De�nición 43 Se dice que un conjunto fa1; : : : ;akg de vectores de Vn es unabase de Vn si
1. fa1; : : : ;akg es linealmente independientey
2. todo vector de Vn puede expresarse como una combinación lineal de a1; : : : ;ak:
Si todo vector de Vn puede expresarse como una combinación lineal de a1; : : : ;ak,entonces se dice que el conjunto fa1; : : : ;akg genera Vn.
35

Corolario 44 Todo conjunto de tres vectores linealmente independientes de V3es una base de V3.
Prueba. Sean a, b, c tres vectores linealmente independientes de V3. Solo nece-sitamos demostrar que a, b, c generan V3. Sea d un vector arbitrario de V3. SeaP 2 R3 tal que P = P�O = d. Entonces de acuerdo con el teorema 42, existennúmeros únicos u; v; t tales que
d = P = ua+ vb+ tc:
Corolario 45 Si ������a1 b1 c1a2 b2 c2a3 b3 c3
������ 6= 0entonces el sistema de ecuaciones lineales
a1x+ b1y + c1z = d1
a2x+ b2y + c2z = d2
a3x+ b3y + c3z = d3
tiene solución única.
Prueba. El sistema de tres ecuaciones lineales es equivalente a la ecuaciónvectorial
ax+ by + cz = d (26)
donde a = (a1; a2; a3), b = (b1; b2; b3), c = (c1; c2; c3) y d = (d1; d2; d3). Como
[abc] = a � (b� c) =
������a1 a2 a3b1 b2 b3c1 c2 c3
������ =������a1 b1 c1a2 b2 c2a3 b3 c3
������ 6= 0;a, b, c son linealmente independientes (teorema 20, página 22). De donde sesigue, de acuerdo con el corolario 44, que la ecuación 26 tiene una solución. Laindependencia lineal de a, b, c implica la unicidad de la solución (problema 4,página 23).Hallando los productos escalares de la ecuación 26 por b� c, c� a, y a�b,
sucesivamente, obtenemos
[abc]x = [dbc] , [abc] y = [adc] , [abc] z = [abd]
o bien
x =[dbc]
[abc]=
������d1 b1 c1d2 b2 c2d3 b3 c3
������������a1 b1 c1a2 b2 c2a3 b3 c3
������;
36

y =[adc]
[abc]=
������a1 d1 c1a2 d2 c2a3 d3 c3
������������a1 b1 c1a2 b2 c2a3 b3 c3
������;
z =[abd]
[abc]=
������a1 b1 d1a2 b2 d2a3 b3 d3
������������a1 b1 c1a2 b2 c2a3 b3 c3
������:
Corolario 46 Tres planos cuyas normales son linealmente independientes seintersectan en un y sólo un punto,
Prueba. Esta es la interpretación geométrica del anterior corolario cuando lasecuaciones que se consideran son las ecuaciones de tres planos. Un punto deintersección de los planos corresponde a una solución del sistema de ecuaciones.
Ejemplo 47 Encuentre todos los puntos de intersección de los planos
2x+ y � 3z = 4
5x+ 4y + 7z = 2
x� y + 2z = �5:
Solución. Escribiendo primero la última ecuación, resolviéndola para x, y susti-tuyendo en las otras dos ecuaciones, tenemos:8<: x = y � 2z � 5
3y � 7z = 149y � 3z = 27
,
8<: x = y � 2z � 5y = 7
3z +143
z = � 56
,
8<: x = � 1118
y = 4918
z = � 56 :
El punto de intersección es (� 1118 ;
4918 ;�
56 ).
Ejemplo 48 Si tres vectores no nulos a, b, c en V3 son mutuamente ortogo-nales, pruebe que forman una base de V3. Exprese un vector d 2 V3 como unacombinación lineal de a, b, c.
37

Solución. Para que a, b, c constituyan una base de V3 han de ser linealmenteindependientes. Es decir, debemos demostrar que la única solución de la ecuación
0 = ua+ vb+ tc (27)
es u = v = t = 0. Tomando el producto escalar de ambos miembros de laecuación 27 por a, tenemos
a � 0 = ua � a+ vb � a+ tc � a:
Como a es ortogonal tanto a b como a c, obtenemos u = 0. Análogamente,tomando el producto escalar con b y c, obtenemos v = 0 y t = 0. De donde a,b, c son linealmente independientes, luego, según el corolario 44, forman unabase de V3.Como a, b, c forman una base de V3, todo vector d 2 V3 puede expresarse
como una combinación lineal de a, b, c:
d = ua+ vb+ tc:
Tomando el producto escalar con a, b, c sucesivamente y como a, b, c sonmutuamente ortogonales, obtenemos
a � d =ua � a, b � d =v b � b, c � d =t c � c
o bien
u =a � djaj2 ; v =
b � djbj2 ; t =
c � djcj2 :
2.10.1. Ejercicios
1. Demuestre que los vectores a, b, c son mutuamente ortogonales y expresed como una combinación lineal de a, b, c.
a) a = (1; 0; 0); b = (0; 1; 1); c = (0;�1; 1); d = (3; 4;�2)b) a = (1; 1; 0); b = (0; 0; 3); c = (1;�1; 0); d = (�2; 5; 1)c) a = (1; 2; 1); b = (�1; 2; 3); c = (�4; 1; 2); d = (1; 3; 5)g
2. Exprese el vector d como una combinación lineal de a, b, c.
a) a = (1; 2; 1); b = (2;�3; 2); c = (2;�1; 1); d = (3; 4;�2)b) a = (1; 1; 1); b = (�2; 3; 1); c = (1; 2;�1); d = (5;�7; 2)
3. Encuentre todos los puntos de intersección de los planos
a)3x+ y + z = 53x+ y + 5z = 7x� y + 3z = 3
b)5x+ y � z = 6
�2x+ y � 4z = 10x� 3y + z = 8:
38

2.11. Espacios euclidianos n-dimensionales
En esta sección de�nimos el espacio euclidiano n-dimensional. Tomamos co-mo modelo el espacio euclidiano tridimensional. Hemos visto que en el espaciotridimensional tres vectores linealmente independientes generan el espacio total(corolario 44, página 36). Dos vectores linealmente independientes a;b 2 V3determinan un plano fua+ vbju; v 2 Rg que pasa por el origen. Un planoasí se llama subespacio bidimensional de R3 y cada punto del subespacio es-tá unívocamente determinado por los dos parámetros u; v. Todo plano en R3
es una traslación fP0 + ua+ vbju; v 2 Rg de tal subespacio. Un vector lin-ealmente independiente, es decir, un vector distinto de cero, determina unarecta f taj t 2 Rg que pasa por el origen. Tal recta se denomina subespaciounidimensional de R3 y cada punto de este subespacio está determinado in-equívocamente por el parámetro único t. Toda recta en R3 es una traslaciónfP0 + taj t 2 Rg de tal subespacio. En un espacio n-dimensional, podemos ten-er k vectores linealmente independientes a1; : : : ;ak donde k = 1; : : : ; n. Tam-bién en este caso, cuando k = n, los vectores a1; : : : ;an generan el espaciototal y cuando k < n generan un subespacio k-dimensional. Tales subespa-cios f t1a1 + � � �+ tkakj t1; : : : ; tk 2 Rg y sus traslaciones, conjuntos de la formafP0 + t1a1 + � � �+ tkakj t1; : : : ; tk 2 Rg, se llaman planos k-dimensionales en elespacio n-dimensional. El plano unidimensional se llama usualmente recta.
De�nición 49 El espacio analítico euclidiano n-dimensional, denotado por Rn,es el espacio vectorial n-dimensional Vn donde:
1. los elementos x = (x1; : : : ; xn) de Vn son los puntos de Rn,
2. un conjunto P de puntos de Rn se llama plano k-dimensional o hiperplanoen Rn (k = 1; : : : ; n�1) si hay un punto P0 2 Rn y k vectores linealmenteindependientes a1; : : : ;ak 2 Vn tales que
P = fP0 + t1a1 + � � �+ tkakj t1; : : : ; tk 2 Rg ;
3. la distancia, escrita d(P;Q), desde el punto P = (x1; : : : ; xn) al puntoQ = (y1; : : : ; yn) en Rn es la longitud del vector Q�P, es decir,
d(P;Q) = jQ�Pj =p(y1 � x1)2 + � � �+ (yn � xn)2:
Un plano unidimensional
L = fP0 + taj t 2 Rg
se llama recta.La ecuación
P = P0 + t1a1 + � � �+ tkakse llama ecuación vectorial de un plano y las ecuaciones de las componentes sellaman ecuaciones parámetricas del plano.
39

Decimos que un vector b es paralelo al plano
P = fP0 + t1a1 + � � �+ tkakj t1; : : : ; tk 2 Rg
si b = r1a1 + � � �+ rkak para algunos r1; : : : ; rk 2 R.
Ejemplo 50 Determine una recta (plano unidimensional) que pase por los pun-tos P0 = (1; 4;�2; 3) y P1 = (2; 0; 1; 0) de R4.
Solución. Sea a = P1 �P0. Entonces,
L = fP0 + t(P1 �P0)j t 2 Rg
es una recta que contiene a P0 y a P1. P0 corresponde a t = 0 y P1 a t = 1.Luego,
L = f(1; 4;�2; 3) + t(1;�4; 3;�3)ges una recta que pasa por P0 y P1.
Ejemplo 51 Determine un plano que pase por los puntos P0 = (2; 3;�2; 3),P1 = (3; 2; 1; 0), P2 = (2; 1; 0; 0) y P3 = (2; 0; 2; 0).
Solución. Sean
a1 = P1 �P0 = (1;�1; 3;�3);a2 = P2 �P0 = (0;�2; 2;�3);a3 = P3 �P0 = (0;�3; 4;�3):
Con el �n de determinar la dimensión del plano necesitamos conocer cuántosde los tres vectores anteriores son linealmente independientes. Los tres vectoresson linealmente dependientes si existen números r1; r2; r3, no todos cero, talesque
r1a1 + r2a2 + r3a3 = 0:
Esta ecuación vectorial es equivalente a las cuatro ecuaciones componentes:
r1 = 0
�r1 � 2r2 � 3r3 = 0
3r1 + 2r2 + 4r3 = 0
�3r1 � 3r2 � 3r3 = 0:
Se encuentra que la única solución a estas ecuaciones es r1 = r2 = r3 = 0.Luego, los tres vectores a1, a2, a3 son linealmente independientes. Por tanto,
P = fP0 + t1a1 + t2a2 + t3a3g= f(2; 3;�2; 3) + t1(1;�1; 3;�3) + t2(0;�2; 2;�3) + t3(0;�3; 4;�3)g
es un plano tridimensional en R4 que pasa por los puntos P0, P1, P2 y P3:P0 corresponde a t1 = t2 = t3 = 0; P1 corresponde a t1 = 1, t2 = t3 = 0; P2corresponde a t2 = 1, t1 = t3 = 0; y P3 corresponde a t3 = 1, t1 = t2 = 0.
40

Ejemplo 52 Determine la intersección de la recta L del ejemplo 50 y el planoP del ejemplo 51.
Solución. Supongamos que P 2 L \ P. Entonces P 2 L implica
P = (1; 4;�2; 3) + t(1;�4; 3;�3)
para algún t 2 R y P 2 P implica
P = (2; 3;�2; 3) + t1(1;�1; 3;�3) + t2(0;�2; 2;�3) + t3(0;�3; 4;�3)
para algunos t1; t2; t3 2 R. Por tanto, P 2 L \ P si y sólo si estas dos expresionesson iguales; es decir, si y sólo si
1 + t = 2 + t1
4� 4t = 3� t1 � 2t2 � 3t3�2 + 3t = �2 + 3t1 + 2t2 + 4t33� 3t = 3� 3t1 � 3t2 � 3t3:
Resolviendo estas ecuaciones, encontramos t = 56 , t1 = � 1
6 , t2 =12 y t3 =
12 .
Por tantoP = (1; 4;�2; 3) + 5
6 (1;�4; 3;�3) =16 (11; 4; 3; 3)
es el punto de intersección de L y P.
De�nición 53 Dos planos en Rn,
P1 = fP1 + s1a1 + � � �+ sjaj j s1; : : : ; sj 2 Rg
yP2 = fP2 + t1b1 + � � �+ tkbkj t1; : : : ; tk 2 Rg
donde j � k < n, son paralelos si cada uno de los conjuntos de k + 1 vectoresfai;b1; : : : ;bkg (i = 1; : : : ; j) es linealmente dependiente; es decir, si cada unode los vectores ai (i = 1; : : : ; j) es paralelo al plano P2.
El teorema siguiente postula que si dos planos son paralelos, entonces o unplano es un subconjunto del otro o su intersección es vacía. Este teorema es unageneralización del corolario 8 y las partes de los teoremas 31 y 37 concernientesa las rectas y planos paralelos como casos particulares.
Teorema 54 Si dos planos en Rn
P1 = fP1 + s1a1 + � � �+ sjaj j s1; : : : ; sj 2 Rg
yP2 = fP2 + t1b1 + � � �+ tkbkj t1; : : : ; tk 2 Rg
donde j � k < n, son paralelos, entonces P1 � P2 o P1 \ P2 = ?:
41

Ejemplo 55 ¿Son paralelos los planos
P1 = f(1; 4;�2; 3) + s1(1; 0; 3;�1) + s2(2; 5;�4; 6)g
y
P2 = f(2; 3;�2; 3) + t1(1;�1; 3;�3) + t2(0;�2; 2; 3) + t3(0;�3; 4;�3)g ?
¿Es vacía su intersección?
Solución. Sean a1 = (1; 0; 3;�1), a2 = (2; 5;�4; 6), b1 = (1;�1; 3;�3), b2 =(0;�2; 2; 3) y b3 = (0;�3; 4;�3). Los conjuntos fa1;a2g y fb1;b2;b3g son lin-ealmente independientes. Los planos son paralelos si fa1;b1;b2;b3g y fa2;b1;b2;b3gson linealmente dependientes, es decir si a1 y a2 son cada uno combinacioneslineales de b1;b2;b3. Supongamos que a1 = �11b1 + �12b2 + �13b3, entonces
1 = �11
0 = ��11 � 2�12 � 3�133 = 3�11 + 2�12 + 4�13
�12 = �3�11 + 3�12 � 3�13:
Resolviendo estas ecuaciones encontramos �11 = 1, �12 = �2, �13 = 1.Análogamente, si a2 = �21b1 + �22b2 + �23b3, entonces
2 = �21
5 = ��21 � 2�22 � 3�23�4 = 3�21 + 2�22 + 4�23
6 = �3�21 + 3�22 � 3�23:
Resolviendo estas ecuaciones encontramos �21 = 2, �22 = 1, �23 = �3.Como a1 y a2 son combinaciones lineales de b1;b2;b3, los planos son parale-
los.De acuerdo con el teorema 54, o P1 \ P2 = P1 o P1 \ P2 = ?, es su�ciente
determinar si un punto cualquiera de P1 pertenece a P2. Sea P1 = (1; 4;�2; 3) 2P1. Si P1 2 P2, entonces hay números t1; t2; t3 2 R tales que
(1; 4;�2; 3) = (2; 3;�2; 3) + t1(1;�1; 3;�3) + t2(0;�2; 2; 3) + t3(0;�3; 4;�3):
Esta ecuación vectorial es equivalente al sistema de ecuaciones componentes:
�1 = t1
1 = �t1 � 2t2 � 3t30 = 3t1 + 2t2 + 4t3
0 = �3t1 + 3t2 � 3t3:
Resolviendo las primeras tres ecuaciones encontramos que si el sistema tieneuna solución ha de ser t1 = �1, t2 = � 9
2 , t3 = 3. Sin embargo, estos valores nosatisfacen la cuarta ecuación. Luego, el sistema no tiene solución alguna. Portanto, P1 =2 P2 y, según el teorema 54, P1 \ P2 = ?.
42

2.11.1. Ejercicios
1. Determine la dimensión del plano que pasa por el conjunto de puntosdados y determine el plano
a) P0 = (1; 1; 1; 1), P1 = (1; 2; 3; 4)
b) P0 = (1; 1; 1; 1),P1 = (0;�2; 2;�3);P2 = (0; 3; 2; 1),P3 = (1; 2; 3; 4)c) P0 = (1; 0; 2; 0), P1 = (0; 2; 3; 1); P2 = (0; 0; 1;�1), P3 = (1; 2; 4; 2)
2. Encuentre la distancia entre los siguientes pares de puntos
a) P0 = (1; 2; 3; 4), P1 = (�1; 3;�2; 1)b) P0 = (1; 1; 1; 1), P1 = (0;�2; 2;�3)c) P0 = (1; 0; 2; 0), P1 = (0; 2; 3; 1)
3. Demuestre que los siguientes planos son paralelos y encuentre su intersec-ción
P1 = f(�1; 2; 3;�2) + t(0; 1; 1; 1)g
P2 = f(1; 0; 2; 0) + t1(1;�2;�1;�1) + t2(1; 0; 1; 1)g :
4. Demuestre que los siguientes planos tiene exactamente un punto común
P1 = f(0; 0; 0; 0) + t1(1; 0; 0; 0) + t2(0; 1; 0; 0)g
P2 = f(0; 0; 0; 0) + t3(0; 0; 1; 0) + t4(0; 0; 0; 1)g :
43