16309338 Control Del Motor de Induccion Con Redes Neuronales Artificiales

of 180
-
Upload
konejito-ballinas -
Category
Documents
-
view
151 -
download
0
Transcript of 16309338 Control Del Motor de Induccion Con Redes Neuronales Artificiales
-
DIVISIN DE ESTUDIOS DE POSGRADO E INVESTIGACIN
REDES NEURONALES EN EL SISTEMA DE CONTROL
VECTORIAL DEL MOTOR DE INDUCCION
POR CESAR ALEJANDRO FRAUSTO DAVILA
TESIS
PRESENTADA COMO REQUISITO PARCIAL PARA OBTENER EL GRADO DE MAESTRO EN CIENCIAS EN INGENIERIA ELECTRICA
DIRECTOR DE TESIS
DR. ANTONIO ZAMARRON RAMIREZ
ISSN 0188-9060
RIITEC: MCIE/VI/2007/13
Torren, Coahuila. Mxico Mayo, 2008
-
AGRADECIMIENTOS
AL CREADOR DE LOS CIELOS Y LA TIERRA, MY LORD JESUS, PORQUE EL DA CONOCIMIENTO O ENTENEBRECE EL ENTENDIMIENTO
A MIS PADRES FELIPA DAVILA Y NICOLAS FRAUSTO A MIS HNOS GABRIEL, XOCHITL, FANNY
SOBRINOS, TANYA, CARINA, KAREN, MARIO Y JOSUE POR SU AMOR FRATERNAL
AL CONACYT POR EL APOYO BRINDADO PARA EL DESARROLLO DE ESTOS ESTUDIOS
AL INSTITUTO TECNOLOGICO DE LA LAGUNA EN ESPECIAL AL AL DR ENRIQUE CUAN, DR VICTOR CABRERA,
AL MC RICARDO VARGAS SALAS, AL DR MARCO ARJONA, AL DR SERGIO SELLSSCHOP, A LA MC JUANA MA. CAMARILLO
AL INSTITUTO TECNOLOGICO DE LEON EN ESPECIAL AL DR ANTONIO ZAMARRON, AL MC ROSALES CISEA Y AL MC JULIAN
RENTERIA POR SU AMISTAD, CONOCIMIENTO, Y CONSEJOS COMPARTIDOS
A MIS AMIGOS EN TORREON Iglesia Bautista Solo Cristo Salva a mis amigos en la Eduardo Guerra, en la vecindad del chavo del 8,a mis compaeros en la maestra, de GOMEZ, de CULIACAN, de CD JUAREZ, de SALTILLO. Y a la familia Gallegos en Len y mis dems amigos Cristianos
en el Jardn. EN UNA U OTRA FORMA TIENEN PARTE EN ESTO
A TODOS GRACIAS
i
-
RESUMEN
En esta tesis se aborda la implementacin de un Sistema de Control Vectorial de Velocidad en
un motor de induccin tipo jaula de ardilla. La tcnica de control conocida como Orientado con
el Flujo de Rotor (OFR) se toma como referencia, y se modifica sustituyendo los utilizados en
forma clsica reguladores Proporcional-Integrador por Redes Neuronales Artificiales del Tipo
Retro propagacin (Back-propagation, RNAs-BP).
La simulacin del sistema de control OFR, el diseo y entrenamiento de las RNAs-BP, as
como su inclusin en el sistema de control se realiza en la plataforma Simulink de Matlab.
Para la implementacin del Sistema de control simulado se usa la herramienta Embedded
Target for the TI TMS320C2000 DSP For use with Real-Time Workshop de Matlab, la cual en
conjunto con Code Composer Studio 3.1 permite generar el cdigo de programacin
correspondiente al modelo simulado y ejecutarlo en un Procesador Digital de Seales
eZdspTMS320F2812 (eZdspF2812).
Palabras Clave: Control de Flujo Orientado, Orientado con el Flujo de Rotor, Redes
Neuronales Artificiales, Procesador Digital de Seales.
ii
-
ABSTRACT
The main body of this thesis is the implementation of a Velocity Vector Control System for
induction machines with squirrel-cage rotor. The control method knew as Rotor Field Oriented
is taken as reference and modified, the proportional-integral regulators are replaced for Back-
Propagation Artificial Neural Networks.
The control system emulation, Neural Networks designing and training, and simulation of the
modified control system is using Matlab Simulink.
The control is implemented in physical form by mean of a Digital Signal Processor
eZdspTMS320F2812, this is programmed using the Embedded Target for the TI
TMS320C2000 DSP For use with Real-Time Workshop by Matlab in conjunction with Code
Composer Studio 3.1.
Keywords: Vector Control, Field Orientation, Rotor Field Oriented, Artificial Neural
Networks, Digital Signal Processor.
iii
-
INDICE GENERAL
Pg. AGRADECIMIENTOS i
RESUMEN ii
ABSTRACT iii
INDICE GENERAL iv
INDICE DE FIGURAS vii
INDICE DE TABLAS x
CAPITULO I
INTRODUCCION
1.1 Objetivo 2
1.2 Justificacin 2
1.3 Estado del arte 3
1.4 Panorama de la tesis 7
Referencias Bibliogrficas 8
CAPITULO II
PRINCIPIOS BASICOS DEL MOTOR DE INDUCCION
2.1 Modelado Matemtico 14
2.2 Transformaciones de coordenadas y vectores espaciales 17
2.2.1 Ecuaciones del motor en un sistema de ejes d-q 20
2.2.2 Ecuaciones del motor en coordenadas de flujo de rotor 21
2.3 Modelo computacional del Motor de Induccin 22
Referencias Bibliogrficas 28
CAPITULO III
CONTROL VECTORIAL DEL MOTOR DE INDUCCION
3.1 Control Vectorial Orientado con el Flujo de Rotor (CV-OFR) 30
3.1.1 Sistema Orientador de Flujo 32
3.1.2 Observador de Flujo 34
iv
-
Pg. 3.1.3 Esquema de Control 38
3.2 Control de velocidad 40
3.3 Fuente Inversora Alimentada por Voltaje 42
3.3.1 Etapa Inversora 43
3.3.1.1 Modulacin SV-PWM 43
3.3.1.2 Generacin de Vectores Base 44
3.3.1.3 Reproduccin del Vector Consigna 46
3.4 Modelo Computacional del CV-OFR 53
Referencias Bibliogrficas 55
CAPITULO IV
REDES NEURONALES ARTIFICIALES
4.1 Neurona Artificial 60
4.2 Red Neuronal Artificial 64
4.2.1 Entrenamiento de una RNA 69
4.2.2 Entrenamiento Supervisado 69
4.2.3 RNA tipo Back-propagation (RNA BP) 70
4.2.4 Regla Delta Generalizada 72
4.2.4.1 Pesos y Parmetros de Aprendizaje 75
4.2.5 Caractersticas de las RNAs 76
4.3 Aplicacin de las RNAs al sistema de Control Vectorial 79
4.4 Modelo Simulink de una RNA actuando como Regulador PI 81
Referencias Bibliogrficas 86
CAPITULO V
CONTROL VECTORIAL CON RNAs
5.1 Sistema de Control SV-RNAs 90
5.1.1 Entrenamiento de las RNAs BP 91
5.1.2 Modelo Simulink del SV-RNAs 101
5.1.2.1 Etapa Reguladora del SV-RNAs 101
v
-
Pg. 5.1.2.2 Observador de flujo del SV-RNAs 103
5.1.2.3 Etapa de procesamiento de seales en el SV-RNAs 105
5.1.3 Proyecto en Code Composer Studio del SV-RNAs 113
5.2 Acondicionamiento de seales y Etapa de potencia 115
5.2.1 Fuente Inversora Alimentada por Voltaje 116
5.2.2 Sensor de Posicin tipo Codificado ptico 117
5.2.3 Circuito Acondicionador de Seales Digitales 118
5.2.4 Sensores de Corriente de efecto Hall 119
5.2.5 Circuito Acondicionador de Seales Analgicas 120
5.2.6 Conexin de entradas y salidas de tarjeta eZdspTMS320F2812 121
Referencias Bibliogrficas 122
CAPITULO VI
ANALISIS DE RESULTADOS
6.1 Algoritmo de control SV-RNAs 123
6.2 Implementacin en tarjeta eZdspTMS320F2812 138
Referencias Bibliogrficas 142
CAPITULO VII
CONCLUSIONES Y FUTUROS DESARROLLOS
7.1 Conclusiones 143
7.2 Propuestas para futuros desarrollos 146
Referencias Bibliogrficas 148
ANEXOS
A. Estimacin de parmetros del motor empleado 150
B. Tabla de datos para la Fuente Inversora alimentada por voltaje Semiteach-IGBT 152
vi
-
Pg. C. Tabla de datos para el IGBT SKM 50GB123D 153
D. Tabla de datos para el Driver SKHI 22A 157
E. Tabla de datos para el Codificador Autonics E30S4 158
F. Tabla de datos para el circuito integrado ULN2003 y ULN2004 159
G. Tabla de datos para el diodo zener 1N4728 168
H. Tabla de datos para el sensor de corriente CSLA1CD 171
I. Parmetros de simulacin 175
INDICE DE FIGURAS Fig. 1.1 Esquema general del Sistema de Control para el Motor de Induccin. 2
Fig. 2.1 Representacin simplificada de una mquina trifsica de dos polos. 15
Fig. 2.2 Interpretacin fsica del vector espacial de la Fuerza Magnetomotriz (FMM). 18
Fig. 2.3 Transformacin de una variable trifsica a un marco de referencia q-d. 19
Fig. 2.4 Modelo en Matlab-Simulink de un motor de induccin trifsico. 24
Fig. 2.5 Subsistema que estima los enlaces de flujo en el marco de referencia q-d. 24
Fig. 2.6 Subsistema que calcula las corrientes del estator referido a los ejes q-d. 24
Fig. 2.7 Subsistema que calcula la velocidad mecnica y transforma a un marco abc. 25
Fig. 2.8 Curva Par-Velocidad en aceleracin libre. Motor de 3HP utilizado (simulacin). 25
Fig. 2.9 Respuesta dinmica del Motor en Aceleracin libre. Parmetros Estimados. 26
Fig. 2.10 Curva Par-Velocidad en Aceleracin libre. Motor 3HP. Con rr3 . 27 Fig. 2.11 Respuesta dinmica del Motor en Aceleracin libre. Con rr3 . 27 Fig. 3.1 Tcnicas de control para maquinas de corriente alterna. 31
Fig. 3.2 Diagrama de bloques, Control Vectorial de un Motor de Induccin. 32
Fig. 3.3 Observador de Flujo implementado en Simulink para el CV-OFR. 36
Fig. 3.4 Observador de Flujo Discreto implementado en Simulink para el CV-OFR. 38
Fig. 3.5 Control de campo orientado alimentado en voltaje. 39
Fig. 3.6 CV-OFR, empleando Observador de Flujo. 41
Fig. 3.7 Estructura de la etapa de potencia en la Fuente VSI. 42
Fig. 3.8 Voltajes versus estados de interrupcin en una fuente VSI. 46
vii
-
Pg Fig. 3.9 Reproduccin de vector consigna en sector U0-U60 (con Vcc=160V). 47
Fig. 3.10 Modelo en Simulink del CV-OFR. 53
Fig. 3.11 Respuesta del motor de induccin, con velocidad controlada por el CV-OFR. 54
Fig. 3.12 Curva Par-Velocidad con aceleracin controlada por el CV-OFR. 55
Fig. 4.1 Modelo McCullon-Pitts de una neurona. 59
Fig. 4.2 Modelo de neurona artificial general. 61
Fig. 4.3 Funciones de activacin ms comnmente empleadas. 63
Fig. 4.4 Funciones de salida ms empleadas. 64
Fig. 4.5 Diferentes mtodos de implementacin de RNAs. 65
Fig. 4.6 Grafica dirigida de una RNA general. 66
Fig. 4.7 Ejemplos de RNAs con distinta arquitectura de alimentacin. 68
Fig. 4.8 Emulacin del SCV empleando RNAs. 79
Fig. 4.9 SCV con RNA BP estimadora de Flujo. 80
Fig. 4.10 Seal de Entrada al Bloque Regulador de Par. 81
Fig. 4.11 Seal de Salida Bloque Regulador de Par. 81
Fig. 4.12 Conjunto de Entrenamiento Entrada-Salida Deseada. 82
Fig. 4.13 Creacin de una RNA BP mediante nntool de Matlab. 82
Fig. 4.14 Topologa empleada en la RNA BP Reguladora de Par. 83
Fig. 4.15 Parmetros de entrenamiento empleados en la RNA BP Reguladora de Par. 83
Fig. 4.16 Reduccin del error durante entrenamiento de la RNA BP Reguladora de Par. 84
Fig. 4.17 Sistema CV-OFR empleando RNA BP Reguladora de Par. 85
Fig. 4.18 Respuesta de la RNA BP Reguladora de Par. 85
Fig. 5.1 Diagrama esquemtico del banco de pruebas, con flujo de seales. 90
Fig. 5.2 Seales entrada-salida de bloque regulador de . 91 qsU
Fig. 5.3 Seales entrada-salida de bloque regulador de . 92 dsU
Fig. 5.4 Seales entrada-salida de bloque regulador de corriente de campo . 92 dsI
Fig. 5.5 Conjunto de entrenamiento para RNA BP, regula . 94 qsU
Fig. 5.6 Conjunto de adaptacin para RNA BP, regula . 94 dsU
Fig. 5.7 Conjunto de entrenamiento RNA BP, regula corriente de campo . 94 dsI
viii
-
Pg.
Fig. 5.8 Topologa empleada en la RNA BP que regula . 95 qsU
Fig. 5.9 Topologa empleada en la RNA BP encargada de regular la Corriente . 96 dsI
Fig. 5.10 Error MSE durante el entrenamiento de la RNA BP, regula . 98 qsU
Fig. 5.11 Error MSE durante la adaptacin de la RNA BP, regula . 98 dsU
Fig. 5.12 Error MSE durante el entrenamiento de RNA BP, regula . 99 dsI
Fig. 5.13 Respuesta de la RNA BP que regula . 100 qsU
Fig. 5.14 Respuesta de la RNA BP que regula . 100 dsU
Fig. 5.15 Respuesta de la RNA BP que regula . 100 dsI
Fig. 5.16 Sistema CV-OFR con RNAs. 101
Fig. 5.17 Etapa reguladora del SV-RNAs. 102
Fig. 5.18 Modelo simulink del observador de flujo empleado en el SV-RNAs. 104
Fig. 5.19 Bloques simulink en librera c2000lib/C281x DSP Chip Support. 106
Fig. 5.20 Ventana de configuracin bloque QEP en simulink. 106
Fig. 5.21 Ventanas de configuracin bloque ADC en simulink. 108
Fig. 5.22 Modulo adquisicin de seales en el SV-RNAs. 109
Fig. 5.23 Modulo generador de seal SV-PWM en el SV-RNAs. 111
Fig. 5.24 Ventanas de configuracin bloque PWM en Simulink. 111
Fig. 5.25 Modelo simulink del SV-RNAs. 112
Figura 5.26 Pantalla del Code Composer Studio. 113
Figura 5.27 Inversor PWM trifsico SEMIKRON. 116
Figura 5.28 Diagrama electrnico para el acondicionamiento de seal digital 118
Figura 5.29 Sensor de corriente de efecto Hall. 120
Figura 5.30 Diagrama electrnico del sensor de corriente. 121
Fig. 5.31 Diagrama a bloques de la tarjeta eZdspF2812 mostrando pines de conexin. 121
Fig. 6.1 Curva Par-Velocidad con aceleracin controlada empleando el CV-OFR 124
Fig. 6.2 Curva Par-Velocidad. Aceleracin controlada empleando el SV-RNAs. 125
Fig. 6.3 Respuesta de la velocidad controlada . 126
Fig. 6.4 Corrientes del estator estimadas en el marco rotatorio q-d. 127
ix
-
Pg Fig. 6.5 Corriente de magnetizacin y par 128
Fig. 6.6 Corrientes de fase etapa de arranque 129
Fig. 6.7 Corrientes de fase durante la inversin de giro 130
Fig. 6.8 Curva Par-Velocidad. Consigna escaln, empleando Reguladores PI 131
Fig. 6.9 Curva Par-Velocidad. Consigna escaln, empleando Reguladores RNA 131
Fig. 6.10 Respuesta de la Velocidad cambio de consigna forma escaln 133
Fig. 6.11 Corrientes en cuadratura 134
Fig. 6.12 Corriente de magnetizacin y par 135
Fig. 6.13 Corriente de fase etapa de arranque 136
Fig. 6.14 Corriente de fase en etapa inversin de giro 137
Fig. 6.15 Corrientes de fase en el estator con 138 puvqds 7.0* =
Fig. 6.16 Corriente de fase en el estator con 139 puvqds 1* =
Fig. 6.17 Corriente de fase. Inicio de oscilaciones 140
Fig. 6.18 Corrientes de fase velocidad del rotor constante 140
Fig. 6.19 Corriente de fase, periodo de oscilaciones en el rotor 140
Fig. 6.20 Seales QEP A y B. Inicio de oscilaciones 141
Fig. 6.21 Seales QEP A y B. Velocidad del rotor constante 141
Fig. 6.22 Seales QEP A y B. Periodo de oscilaciones en el rotor 142
INDICE DE TABLAS Tabla 2.1 Parmetros elctricos de motor de induccin trifsico utilizado. 23
Tabla 3.1 Patrones de conmutacin en una VSI, y sus voltajes de fase y lnea generados. 45
Tabla 3.2 Definicin de y para los distintos sectores. 49 1t 2t
Tabla 3.3 Tabla de asignacin de variables en funcin del sector. 52 abcONt
Tabla 5.1 Caractersticas empleadas en las RNAs BP. 96
Tabla 5.2 Parmetros de Entrenamiento. 97
x
-
CAPTULO I
Introduccin
Las tcnicas de control para motores de induccin es un tema que ha tenido un gran desarrollo
en los ltimos aos, partiendo del empleo de tcnicas clsicas de control [1], hasta llegar a las
tcnicas de control no lineal [2, 3] y tcnicas heursticas [4-7].
En esta tesis se presenta el desarrollo de un accionador en control vectorial (tambin referido
en la literatura como control en campo orientado) para un motor de induccin tipo jaula de
ardilla utilizando una tcnica heurstica: las Redes Neuronales Artificiales (RNAs). El control
vectorial se implementa en la modalidad conocida como Orientado con el Flujo de Rotor
(OFR) propuesta por Blaschke, conocida como Orientacin Directa [1]. Las ecuaciones para su
implementacin y la configuracin del sistema son tomadas del trabajo de Briz [8], y
modificado de tal forma que los bloques reguladores Proporcional-Integral implicados
clsicamente son sustituidos por RNAs.
El algoritmo del OFR con reguladores PI y RNAs se ha simulado en Matlab-Simulink e
implementado en el sistema de desarrollo eZdspTMS320F2812 de Spectrum Digital que
contiene como base al Procesador Digital de Seales (DSP) TMS320F2812. El software
utilizado para la programacin del DSP ha sido el Code Composer Studio (CCS) y el toolbox
Embedded Target for TIC2000 de Matlab. La etapa de potencia utilizada para accionar al
motor de induccin es un inversor alimentado por voltaje (VSI por sus siglas en ingles) de tres
ramas, formado por seis transistores de unin bipolar con compuerta aislada (IGBT) activados
por pulsos PWM. Los pulsos PWM son generados usando la modulacin mediante el Vector
Espacial, SVPWM (por sus siglas en Ingles, Space Vector PWM). En la figura 1.1 se muestra
un diagrama esquemtico del sistema implementado.
AdministradorCross-Out
AdministradorInserted Text
AdministradorCross-Out
AdministradorInserted Texti
AdministradorCross-Out
AdministradorInserted Text
-
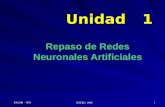
Motor de Induccion
INVERSORIGBT's
DSPeZdspTMS320F2812 CCS 3.1
MATLAB
Simulink
Workshop
Embedded Target forTIC2000
SENSORES:ENCODER , CORRIENTES (efecto Hall)
INTERFASE12-24 V to 3.3 V
ALGORITMODE CONTROL
Fig. 1.1 Esquema general del Sistema de Control para el Motor de Induccin 1.1 OBJETIVO Implementar el algoritmo de control vectorial en un DSP para regular la velocidad de un motor
de induccin tipo jaula de ardilla utilizando redes neuronales artificiales como reguladores en
los lazos de velocidad, par y campo.
1.2 JUSTIFICACION La implementacin del control vectorial para un motor de corriente alterna es un tema de gran
inters para el grupo de investigacin que desarrolla algoritmos de control en mquinas
elctricas rotativas en la Maestra en Ingeniera Elctrica del Instituto Tecnolgico de la
Laguna, ya que esta tcnica de control tambin puede ser aplicada en mquinas sincronas y en
motores de c.a. de imanes permanentes enterrados en el rotor. El control vectorial permite
regular con gran exactitud la velocidad, par y/o posicin de un motor de induccin trifsico
como si ste fuera un motor de corriente continua. Mediante est tcnica las corrientes de fase
del estator son representadas por una corriente de par y una corriente de campo que giran en
sincronismo con el flujo del rotor, permitiendo el desacoplo casi perfecto de estas dos
corrientes y emulando as el control de un motor de corriente continua. El control vectorial
asociado con el SVPWM permite controlar con gran facilidad la magnitud y ngulo del vector
2
AdministradorCross-Out
AdministradorInserted Textembebidos
AdministradorCross-Out
AdministradorInserted Textdesacoplamiento
-
de tensin, lo que permite con relativa facilidad modificar la frecuencia y voltaje aplicado a los
devanados del motor.
El esquema bsico del control vectorial incluye entre sus bloques dos reguladores, el regulador
de la corriente de par y el regulador de la corriente de campo. Si lo que se quiere es controlar la
velocidad es necesario incluir un tercer regulador, y para controlar la posicin del rotor es
necesario un cuarto regulador. El desarrollo de este proyecto permitir en un futuro
implementar estos reguladores con diferentes tcnicas, como es el caso de este trabajo en el
que se sustituye el clsico regulador PI por una RNA.
El desarrollo del presente proyecto tambin apoyar hasta cierto punto los siguientes cursos del
programa de postgrado:
Modelado y anlisis de maquinas elctricas. Propulsores de maquinas elctricas. Calidad de la Energa. Programacin y simulacin. Microprocesadores, Microcontroladores y Procesadores Digitales. Sistemas Inteligentes.
1.3 ESTADO DEL ARTE Antes de los aos 1950s el uso de motores de induccin se limitaba principalmente a
aplicaciones en modo de funcin libre, sin ningn control sobre su velocidad, posicin o par
[11, 16]. Las aplicaciones que requeran un control aproximado de la velocidad utilizaban
tcnicas bsicas tales como, cambio de nmero de polos, variacin de la resistencia del rotor,
control por tensin de alimentacin, etc. Esto requera en ocasiones caractersticas especiales
de diseo en el motor y presentaban una respuesta pobre de control [13, 17].
Conforme se fueron haciendo evidentes las ventajas del motor de induccin comparado con
otros tipos de motores elctricos, se vio la necesidad de desarrollar nuevas tcnicas de control
con el fin de expandir su campo de aplicacin [8]. Dos aspectos limitaban el desarrollo de
3
-
propulsores para motores de induccin, por un lado el motor de induccin es un sistema
dinmico no lineal y los modelos matemticos que le representaban hacan difcil la
implementacin de un sistema de control [18] y por otro lado los dispositivos de electrnica de
potencia y de procesamiento de seales aun no alcanzaban el desarrollo conveniente para
implementar dichos sistemas [8, 19].
Con los avances en la microelectrnica y electrnica de potencia fue posible desarrollar
propulsores de uso industrial empleando tcnicas de Control Escalar convencionales las cuales
requeran poca capacidad de cmputo. Dichos propulsores no permitan un control sobre el par
desarrollado por la maquina y presentaban una respuesta pobre en condiciones de baja
velocidad y mayores a la nominal [11-13, 20, 21].
Gracias a los trabajos de Kovacs y Racz (1959), los cuales introdujeron el concepto de
Cantidad Vectorial de una maquina de corriente alterna [16], Hasse (1969) y Blaschke (1972)
presentan la idea de Tcnica de Control Vectorial, la cual aborda el problema de control de un
motor de induccin haciendo uso de cantidades vectoriales en lugar de seales sinusoidales
peridicas [8, 12].
El mtodo OFR propuesto por Hasse y Blaschke se basa en reescribir las ecuaciones dinmicas
del motor de induccin en un marco de referencia que rota junto con el vector de flujo de rotor.
En este nuevo sistema, si se mantiene el flujo de rotor constante, se presenta una relacin lineal
entre las variables de control y la velocidad del motor, permitiendo el desacoplamiento del
control de par y flujo. El mtodo propuesto por Hasse requiere como realimentacin la
velocidad del rotor para determinar la posicin del flujo de rotor (modo indirecto). El mtodo
propuesto por Blaschke requiere adems la medicin o estimacin de la posicin del flujo de
rotor (modo directo).
Algunas desventajas de los mtodos de Hasse y Blaschke son:
Suponen la magnitud del flujo de rotor constante y esto afecta en la realidad el desacoplamiento entre dicho parmetro y la velocidad.
4
AdministradorCross-Out
AdministradorInserted Text
AdministradorCross-Out
AdministradorInserted Text
AdministradorCross-Out
AdministradorInserted Text
-
Al considerar el flujo del rotor como referencia la respuesta del sistema de control depende de la estimacin adecuada de la resistencia del rotor.
Requieren como seal de realimentacin la velocidad del rotor. Dos de las variables de estado empleadas (flujos y corrientes del rotor) son
normalmente no mesurables.
Consideran el uso de una fuente de voltaje ideal sinusoidal variable en magnitud y frecuencia.
No consideran los efectos de saturacin del ncleo magntico.
Aunque ya se haban propuesto desde los aos 1960s modelos matemticos involucrando el
control vectorial, la implementacin practica aun requera de avances en algunos de sus
elementos [8, 11, 15], tal como
La fuente de excitacin con magnitud y frecuencia variable (normalmente un modulo de Conversin con Electrnica de Potencia CEP).
El modulo Propulsor-Controlador (el cual procesa los estados de la maquina y genera consignas de alimentacin).
Algunos de los pioneros en la implementacin con aplicacin industrial de las tcnicas de
control vectorial, fueron Leonhard (1983), R. Gabriel (1982) y Okuyama (1983) entre otros
[22].
La tcnica de Control Directo de Par fue propuesta por Naguchi y Takahashi (1986) [23], como
una opcin de mejora en las tcnicas de control vectorial. Esta tcnica se diferencia de las
anteriores en que considera la salida del controlador como la seal de activacin del CEP y
hace uso de una tabla de valores para gobernar sus dispositivos de potencia, de tal forma que
todos los procesos de conmutacin en el CEP dependen del estado electromagntico del motor,
logrando un control de velocidad y par con mejor respuesta dinmica [23].
Actualmente, dentro de las tcnicas de control vectorial se encuentran una gran variedad de
modalidades, que difieren principalmente por [12, 15, 24]:
5
AdministradorCross-Out
AdministradorInserted Textmedibles
AdministradorCross-Out
AdministradorInserted Text
AdministradorCross-Out
AdministradorInserted Text
AdministradorCross-Out
AdministradorInserted Text
AdministradorCross-Out
AdministradorInserted Text
-
El campo magntico que emplea como referencia (rotor, estator o entrehierro). La manera en la cual se obtienen los parmetros involucrados en la tarea de control
(directo o indirecto).
Las variables de estado empleadas en el modelado (par, flujo, corriente).
Hasta la fecha se han propuesto cambios de variada ndole en la implementacin del esquema
del control vectorial, los cuales pueden clasificarse en los siguientes dos grupos:
1.- Los que hacen uso de Tcnicas convencionales de control tales como [2, 3]: Uso de
Observadores, Control Robusto, Control Adaptativo, tcnicas de Linealizacin, Control no
Lineal, Teoria de Lyapunov, etc., con el fin de mejorar la estimacin de los parmetros
elctricos del motor [25-30], mejorar la estimacin del vector de flujo [31-37] o mejorar la
eficiencia en el CEP [38-43], entre otros. Dentro de estas tcnicas sobresale el inters que ha
tenido en publicaciones cientficas una modificacin a la tcnica de control vectorial la cual
elimina el uso del sensor de posicin y/o velocidad del rotor (encoders, tacogeneradores, etc.),
nombrada en algunas publicaciones como Control Sin Sensor (Sensorless, o SVC de su
original en Ingles Sensorless Vector Controlled ) la cual sigue haciendo uso del modelo
vectorial de la maquina, empleando observadores de orden completo tal como Observadores de
Luenberg , Observadores de modo deslizante (Sliding mode Observers) o filtros de Kalman
con el fin de estimar variables de estado del motor en vez de mesurarlas [44-52].
2.- Los que hacen uso de Tcnicas heursticas [4-7] tales como: Uso de controladores difusos
(Fuzzy), Neuro Difusos (Neurofuzzy), Algoritmos Genticos (AG), Redes Neuronales
Artificiales (RNAs), etc., con el fin de mejorar la estimacin de los parmetros elctricos de la
maquina [53-59], la estimacin del vector de flujo [60-64], la etapa de control [64-68], la
realimentacin de variables [69-72] o la activacin del modulo CEP [63], entre otros.
Actualmente gracias a los avances en la microelectrnica y electrnica de potencia se han
implementado de manera exitosa algunas de estas propuestas, y el motor de induccin a
6
AdministradorCross-Out
AdministradorInserted Textt
AdministradorCross-Out
AdministradorInserted Texti
AdministradorCross-Out
AdministradorInserted Text
AdministradorCross-Out
AdministradorInserted Textmedirlas
-
comenzado a desplazar al motor de corriente continua en aplicaciones de velocidad variable [8,
73].
En el rea de propulsores de maquinas de corriente alterna, el uso de microcontroladores [22,
70], tarjetas DSP [32, 33, 49, 60, 74-77], y otros dispositivos electrnicos [71, 72], as como el
constante desarrollo de dispositivos electrnicos de potencia, y la mejora en sus tcnicas de
activacin [63] ha permitido mantener esta rea de investigacin activa y en constante
expansin.
1.4 PANORAMA DE LA TESIS Este trabajo consta de 7 captulos, ms Apndices, los que se detallan a continuacin.
Al ser el motor de induccin el tipo de motor a controlar, en el captulo 2 se hace un breve
estudio de su modelo en estado estable y se obtienen las ecuaciones expresadas en forma de
vectores espaciales que sern tiles para la implementacin del control vectorial. Al final del
capitulo se presenta el modelo computacional en Simulink junto con resultados obtenidos al
simular el modelo matemtico considerando los parmetros del motor a utilizar.
En el capitulo 3 se define la estrategia de control a utilizar. En la primera parte de ste captulo
se describe el modelado matemtico del motor en coordenadas sincronas con el flujo del rotor.
Con este modelo matemtico se desarrollan simulaciones en computadora y se implementa el
elemento principal en el control vectorial, esto es, el algoritmo de estimacin de flujo. Siendo
la Fuente Inversora de Voltaje un elemento relevante en la respuesta del control vectorial, se
hace una breve referencia a la etapa inversora y la tcnica de accionamiento utilizada en este
trabajo. Al final del captulo se presenta el comportamiento de la mquina bajo el gobierno del
controlador desarrollado, estudios basados en simulaciones.
El capitulo 4 aborda el tema de las Redes Neuronales Artificiales (RNAs), se presentan los
rasgos caractersticos de las topologas que emplean el algoritmo de entrenamiento conocido
como de Retro propagacin (Back-propagation). En la segunda parte del capitulo se hace una
7
AdministradorCross-Out
AdministradorInserted Text
AdministradorCross-Out
AdministradorInserted Texta
AdministradorCross-Out
AdministradorInserted Text
AdministradorCross-Out
AdministradorInserted Text
-
resea de las distintas aplicaciones de las RNAs en los sistemas de control vectorial y se
define la aplicacin a utilizar en este trabajo. Por ltimo, se da una descripcin del software
utilizado para su diseo, entrenamiento e implementacin y se presentan estudios basados en
simulaciones de la inclusin de RNAs en el sistema de control vectorial, empleando el sistema
de control desarrollado en el capitulo 3 como modelo para la adquisicin de datos de
entrenamiento.
En el capitulo 5 se presenta la implementacin del hardware y software para el control
vectorial propuesto. En este capitulo se da una descripcin del hardware y software que
permite su implementacin. Se dan a conocer algunos aspectos relevantes de la tarjeta
eZdspTMS320F2812. Se describe el diseo y construccin de circuitos de acondicionamiento
de seales que permiten habilitar la comunicacin entre el modulo CEP, el DSP, los sensores
de corriente de efecto hall y el sensor de posicin empleado para la estimacin de velocidad.
En el capitulo 6 se discuten los resultados obtenidos tanto a nivel simulacin como
experimentacin.
En el capitulo 7 se presentan las conclusiones y comentarios de este trabajo que pudieran
suscitar futuros desarrollos.
Referencias Bibliogrficas 1. Buja, G.S. and M.P. Kazmierkowski, Direct Torque Control of PWM Inverter- Fed AC
Motors- A Survey. IEEE Transactions on Industrial Electronics, 2004. 51(4): p. 744-758.
2. Chiasson, J., Nonlinear Controllers for an induction motor. Control Eng. Practice, 1996. 4(7): p. 977-990.
3. Bodson, M. and J. Chiasson, Differential -Geometric Methods for Control of Electric Motors. International Journal of Robust and Nonlinear Control, 1998. 8: p. 923-954.
4. Cardoso, F.D.S., J.F. Martins, and V.F. Pires, A Comparative Study of a PI, Neural Network and Fuzzy Genetic Approach Controllers for an AC-Drive, in COIMBRA. 1998, IEEE: AMC.
5. Bim, E. and L.R. Valdenebro, A Genetic Algorithms Approach for Adaptive Field Oriented Control of Induction Motor Drives. IEEE Power Engineering Society, 1999. 9: p. 643-646.
8
AdministradorCross-Out
AdministradorInserted Text
AdministradorCross-Out
AdministradorInserted Text
AdministradorCross-Out
AdministradorInserted Text
AdministradorCross-Out
AdministradorInserted TextH
AdministradorCross-Out
AdministradorInserted Text
AdministradorCross-Out
AdministradorInserted Text
-
6. Salmon, J.C., E.P. Nowicki, and F. Ashrafzadeh, A Self-Organizing and Self-Tuning Fuzzy logic Controller for Field Oriented Control of Induction Motor Drives IEEE Transaction on Neural Networks, 1995. 3: p. 1656-1662.
7. Bose, B.K., J.O.P. Pinto, and L.E. Borges da Silva, A Stator-Flux-Oriented Vector Controlled Induction Motor Drive With Space-Vector PWM and Flux-Vector Synthesis by Neural Networks. IEEE transactions on Industry Applications, 2001. 37(5): p. 1308-1319.
8. Briz del Blanco, F., Control Vectorial del Motor de Induccin con Identificacion y Adaptacion a los Parametros de la Carga, in Dep. Ing. Elctrica, Electronica, de Computadores y Sistemas. 1995, Universidad de Oviedo: Oviedo.
9. Haykin, S., Neural Networks A Comprehensive Foundation. 2004: IEEE Computer Society Press.
10. Miller III, W.T., R.S. Sutton, and P.J. Werbos, Neural Networks for Control, ed. N.S. Foundation. Vol. EET-8819699. 1991: University of New Hampshire
11. Boldea, I. and N.S. A., ELECTRIC DRIVES. 1999: CRC Press LLC. 12. Novotny, D.W. and L.T. A., Vector Control and Dynamics of AC Drives. Monographs
in Electrical and Electronic Engineering. 2000: CLARENDON PRESS - OXFORD. 13. Krause, P.C., O. Wasynczuk, and S.D. Sudhoff, Analysis of Electric Machinery and
Drive Systems. Second ed. IEEE Press Series on Power Engineering, ed. M.E. El-Hawary. 2002: IEEEPress,Wiley-Interscience.
14. Mohan, N., Advanced Electric Drives Analysis, Control and Modeling using Simulink. 2001: MNPERE.
15. WEMPEC, Field Orientation and High Performance Motion Control, S.o.P. 1981-1988, Editor. 1989, Wisconsin Electric Machines and Power Electronics Consortium: Wisconsin.
16. Trzynadlowski, A.M., The Field Orientation Principle in Control of Induction Motors. 1994, Nevada, Reno: Kluwer Academic Publishers.
17. Chapman, S.J., Maquinas Elctricas. 1987: Mc Graw-Hill. 18. Bodson, M. and J. Chiasson, High-Performance Induction Motor Control Via Input-
Output Linearization. IEEE Control Systems, 1998. 8: p. 25. 19. Stemmler, H., High Power Industrial Drives. Proceedings of the IEEE, 1994. 82(8). 20. Vargas Salas, R. and M.M.G. Muoz, Control Escalar y Vectorial de las maquinas de
induccin, in Divisin de Estudios de Posgrado e Investigacin. 2002, Instituto Tecnolgico de la Laguna: Coahuila, MX.
21. Vargas Salas, R. and L. Marcial, Control de Velocidad del Motor de induccin Jaula de Ardilla, in Divisin de Estudios de Posgrado e Investigacin. 2005, Instituto Tecnolgico de la Laguna: Coahuila, MX.
22. Wishart, M.T. and J.K. Steinke, Vector Control of a High Power Induction Machine. IEEE AFRICON '92 Proceedings, 1992. 1(1): p. 132.
23. Naassani, A.A. and E. Monmasson, Synthesis of Direc Torque and Rotor Flux Control Algorithms by Means of Sliding-Mode Theory. IEEE Transactions on Industrial Electronics, 2005. 52(3).
24. Novotny, D.W. and a. others, Field Orientation and High Performance Motion Control. Summary of Publications. 1988, Wisconsin: WEMPEC.
9
-
25. DwayneTelford, M.W. Dunnigan, and B.W. Williams, Online Identification of Induction Machine Electrical Parameters for Vector Control Loop Tuning. IEEE Transactions on Industrial Electronics, 2003. 50(2): p. 9.
26. Guidi, G. and H. Umida, A novel Stator Resistance Estimation Method for Speed-Sensorless Induction Motor Drives. IEEE Transactions on Industrial Electronics, 2000. 36(6): p. 9.
27. Kerkman, R.J., J.D. Thunes, and Otros, A Frequency Based Determination of the Transient Inductance and Rotor Resistance for Field Commissioning Purpose. Allen-Bradley Co., 1999. Standard Drives Bussines (POB 760).
28. Wang, K., J. Chiasson, and M. Bodson, An online Rotor Time Constant Estimator for the Induction Machine. IEEE Transactions on Control Systems Technology, 2005. 15(2): p. 9.
29. Vaclavek, P. and P. Blaha, Lyapunov-Function-Based Flux and Speed Observer for AC Induction Motor Sensorless Control and Parameter Estimation. IEEE Transactions on Industrial Electronics, 2006. 53(1): p. 8.
30. Hinkkanen, M. and J. Luomi, Parameter Sensitivity of Full-Order Observers for Induction Motors. IEEE Transactions on Industrial Electronics, 2002. 15(6): p. 12.
31. Ohishi, K., et al., High-Performance Speed Servo System Considering Voltage Saturation of a Vector-Controlled Induction Motor. IEEE Transactions on Industrial Electronics, 2006. 53(3): p. 8.
32. Bose, B.K., T.-W. Chun, and M.-K. Choi, A Novel Start-Up Scheme of Stator Flux Oriented Vector Controlled induction Motor Drive Without Torque Jerk. IEEE Transactions on Industrial Electronics, 2001. 71(1): p. Feb 2001.
33. Lee, J.-S., T. Takeshita, and N. Matsui, Stator-Flux-Oriented Sensorless Induction Motor Drive for Optimum Low-Speed Performance. IEEE Transactions on Industrial Applications, 1997. 33(5): p. 7.
34. Hurst, K.D., T.G. Habetler, and F. Profumo, Zero-Speed Tacholess IM Torque Control: Simply a Matter of Stator Voltage Integration. IEEE Transactions on Industrial Applications, 1998. 34(4): p. 6.
35. Harnefors, L., M. Jansson, and R. Ottersten, Unified Sensorless Vector Control of Synchronous and Induction Motors. IEEE Transactions on Industrial Electronics, 2003. 50(1): p. 8.
36. Wai, R.-J. and K.-M. Lin, Robust Decoupled Control of Direct Field-Oriented Induction Motor Drive. IEEE Transactions on Industrial Electronics, 2005. 52(3): p. 18.
37. Ide, K., J.-I. Ha, and M. Sawamura, A Hybrid Speed Estimator of Flux Observer for Induction Motor Drives. IEEE Transactions on Industrial Electronics, 2006. 53(1): p. 8.
38. Salo, M. and H. tuusa, A Vector-Controlled PWM Current-Source-Inverter-Fed Induction Machine Drive Whit Stator Current Control Method. IEEE Transactions on Industrial Electronics, 2005. 52(2): p. 9.
39. Steinke, J.K., G.J. Dudler, and B.P. Huber, Field Oriented Control of a High Power GTO-VSI Fed AC Drive with High Dynamic Performance Using a Programmable High Speed Controller (PHSC). IEEE Transactions on Control Systems Technology, 1992. 34(1): p. 7.
40. Naassani, A.A., E. Monmasson, and J.-P. Louis, Synthesis of Direc Torque and Rotor Flux Control Algorithms by Means of Sliding-Mode Theory. IEEE Transactions on Industrial Electronics, 2005. 52(3): p. 15.
10
-
41. Buja, G.S. and M.P. Kazmierkowski, Direct Torque Control of PWM Inverter-Fed AC Motors- A Survey. IEEE Transactions on Industrial Electronics, 2004. 51(4): p. 14.
42. Boldea, I., C. Lascu, and F. Blaabjerg, Variable-Structure Direct Torque Control- A Class of Fast and Robust Controller for Induction Machine Drives. IEEE Transactions on Industrial Electronics, 2004. 51(4): p. 8.
43. Idris, N.R.N. and A.H.M. Yatim, Direct Torque Control of Induction Machines With Constant Switching Frequency and Reduced Torque Ripple. IEEE Transactions on Industrial Electronics, 2004. 51(4): p. 10.
44. Boldea, I., C. Lascu, and F. Blaabjerg, Comparative Study of Adaptive and Inherently Sensorless Observers for Variable-Speed Induction-motion Drives. IEEE Industrial Transactions on Industrial Electronics, 2006. 53(1).
45. Holtz, J. and H. Pan, Acquisition of Rotor Anisotropy Signals in Sensorless Position Control Systems. IEEE Transactions on Industrial Applications, 2004. 40(5): p. 9.
46. Kilic, B., Sensorless Control of Induction Machine, in School of Engineering and Natural Science. 2004, Sabanci University: Estanbul, Turquia.
47. Boldea, I., C. Lascu, and F. Blaabjerg, Comparative Study of Adaptive and Inherently Sensorless Observers for Variable-Speed Induction-Motor Drives. IEEE Transactions on Industrial Electronics, 2006. 53(1): p. 9.
48. Chiasson, J. and M. Bodson, A Comparison of Sensorless Speed Estimation Methods for Induction Motor Control. Proceedings of the American Control Conference IEEE, 2002. 1(1): p. 6.
49. Park, M.-H., S.-K. Sul, and Y.-R. Kim, Speed Sensorless Vector Control of Induction Motor Using Extended Kalman Filter. IEEE Transactions on Industrial Applications, 1994. 30(5): p. 9.
50. Consoli, A., G. Scarcella, and A. Testa, Speed and Current Sensorless Field Oriented Induction Motor Drive Operating at Low Stator Frequencies. IEEE IAS 2002, 2002. 1(1): p. 8.
51. Jacobina, C.B., J.B. Fo, and F. Salvadori, A Simple Indirect Field Oriented Control of Induction Machines Without Speed Measurement. IEEE Transactions on Industrial Electronics, 2000. 40(4): p. 5.
52. Ferrah, A., K.J. Bradley, and P.J. Hogben-Laing, A Speed Identifier for Induction Motor Drives Using Real-Time Adaptive Digital Filtering. IEEE Transactions on Industrial Applications, 1998. 34(1): p. 7.
53. Wood, R., D. Katsis, and A. Trentin, A new Method for Induction Parameters Estimation Using Genetic Algorithms and Transient Speed measurements IEEEConference Record of the 41st IAS Annual Meeting, 2006. 5.
54. Phumiphak, T. and C. Chat-uthai, Estimation of Induction Motor Parameters based on field test coupled whit Genetic Algorithms. IEEE International Conference on Power System Technology. Proceedings, 2002. 2: p. 5.
55. Bim, E., L.R. Valdenebro, and J.R. Hernandez, A Neuro-Fuzzy Based Parameter Identification of an Indirect Vector-Controlled Induction Motor Drive. Proceedings of the IEEE, 1999. 1(3): p. 6.
56. Keyhani, A. and A.B. Proca, Identification of Variable Frequency Induction Motor Models From Operating Data. IEEE Transactions on Energy Conversion, 2002. 17(1): p. 8.
11
-
57. Bim, E. and L.R. Valdenebro, A Genetic Algorithms Approach for Adaptive Field Oriented Control of Induction Motor Drives. IEEE Industrial Transactions 1999. 52(9): p. 3.
58. Huerta, P.F., J.J. Rodriguez, and I.C. Torres, Modelo en Simulink de una Red Neuronal Artificial de Retropropagacion para Estimar la Resistencia del Rotor. 9 Congreso Nacional de Ingenieria Electromecanica y de Sistemas, 2006. ELE-09.
59. Lin, F.-J., R.-J. Wai, and C.-H. Lin, Decoupled Stator-Flux-Oriented Induction Motor Drive With Fuzzy Neural Network Uncertainty Observer IEEE Transactions on Industrial Electronics, 2000. 47(2): p. 12.
60. Blaabjerg, F., B.K. Bose, and Otros, A Simple Direct-Torque Neuro-Fuzzy Control of PWM-Inverter-Fed Induction Motor Drive. IEEE Transactions on Industrial Electronics, 2000. 47(4): p. 8.
61. Bose, B.K., W.S. Oh, and K.M. Cho, Self Tuning Neural Network Controller for Industrial Motor Drives. IEEE Industrial Transactions on Industrial Electronics, 2002. 78(3): p. 5.
62. Rafiq, A., M.G. Sarwer, and M. Datta, Genetic Algorithm Based Fast Speed Response Induction Motor Drive with ANN Flux Estimator. IEEE Transactions on Neural Networks, 2005. 48(4): p. 6.
63. Bose, B.K., O.P. Pinto, and L.E.B.d. Silva, A Stator-Flux-Oriented Vector-Controlled Induction Motor Drive With Space-Vector PWM and Flux-Vector Synthesis by neural Networks IEEE Transactions on Industrial Applications, 2001. 37(5): p. 11.
64. Hasan, K.M., L. Zhang, and B. Singh, Neural Network Control of Induction Motor Drives for Energy Efficiency and High Dynamic Performance. IEEE Transactions on Industrial Applications, 1997. IA-20(6).
65. Salmon, J.C., F. Ashrafzadeh, and E.P. Nowicki, A Self-Organizing and Self-Tuning Fuzzy Logic Controller for Field Oriented Control of Induction Motor Drives. IEEE Transactions on Neural Networks, 1995. 30(1): p. 7.
66. Bose, B.K., G.C.D. Sousa, and J.G. Cleland, Fuzzy Logic Based On-Line Efficiency Optimization Control of an Indirect Vector-Controlled Induction Motor Drive. IEEE Transactions on Industrial Electronics, 1995. 42(2): p. 7.
67. Moallem, M., et al., Diseno Optimo Multiobjetivos Genetico-Difuso de Un Controlador PIen el Control Indirecto de Campo Orientado de un motor de induccin. IEEE Transactions on magnetics, 2001. 37(5): p. 4.
68. Hasan, K.M., L. Zhang, and B. Singh, Neural Network Idded Energy Efficiency Control for a Field-orientation Induction Machine Drive. IEEE Conferences Publications, 1999. 468(1): p. 5.
69. Bose, B.K. and G. Simoes, Neural Networks Based Estimation of Feedback Signals for a Vector Controlled Induction Motor Drive. IEEE Transactions on Industrial Applications, 1994. IA-14: p. 9.
70. Heredia, J.R., F.P. Hidalgo, and J.L.D. Paz, Sensorless Control of Induction Motor by Artificial Neural Networks. IEEE Transactions on Industrial Electronics, 2001. 48(5): p. 3.
71. Kuchar, M., P. Brandstetter, and M. Kaduch, Sensorless Induction Motor Drive with Neural Networks. 35 Annual IEEE Power Electronics Specialists Conference 2004: p. 5.
12
-
72. Kim, S.-H., et al., Speed-Sensorless Vector Control of an Induction Motor Using Neural Networks Speed Estimation. IEEE Transactions on Industrial Electronics, 2001. 48(3): p. 6.
73. Vasquez Corral, M.H. and R. Vargas Salas, Control de Velocidad de un Motor Sincrono de Imanes Permanentes, in Divisin de Estudios de Posgrado e Investigacin. 2005, Instituto Tecnolgico de la Laguna: Coahuila, MX.
74. Trzynadlowski, A.M. and C. Lascu, A Sensorless Hybrid DTC Drive for High-Volume Low-Cost Applications. IEEE Transactions on Industrial Electronics, 2004. 51(5): p. 8.
75. Wai, R.-J. and W.-K. Liu, Nonlinear Control for Linear Induction Motor Servo Drive. IEEE Transactions on Industrial Electronics, 2003. 50(5): p. 16.
76. Chiasson, J., Nonlinear Controller for an Induction Motor. Control Eng. Practice Vol 4. Vol. 4. 1996: Elsevier Science Ltd.
77. Arribas, J.R. and C.M.V. Gonzales, Optimal Vector Control of Pumping and Ventilation Induction Motor Drives. IEEE Transactions on Industrial Electronics, 2002. 49(4): p. 7.
13
-
CAPTULO II
Principios Bsicos del Motor de Induccin En este capitulo se da una breve resea del modelo matemtico del motor de induccin en
estado estacionario empleando vectores espaciales, esto es una herramienta matemtica
que permite implementar el Control Vectorial. Al inicio del capitulo se presentan las
ecuaciones matemticas que modelan el motor empleando un sistema de referencia
trifsico estacionario (a-b-c), posteriormente se introduce lo que se conoce como
traslacin de ejes implementado mediante las transformadas de Clark y de Park, que
permiten trasladar el sistema de referencia a un sistema de ejes (d-q) ortogonal y rotatorio
[1-3]. Al final del capitulo se presenta la simulacin computacional en Simulink de
Matlab software empleado en este trabajo para la simulacin del motor (Capitulo 2), del
sistema de control (Capitulo 3 y 4) y para la programacin de la Tarjeta eZdspF2812
(Capitulo 5).
2.1 Modelado Matemtico Al momento de modelar un motor de induccin es comn hacer una serie de
simplificaciones del sistema tales como:
Considerar el campo de magnetizacin uniformemente distribuido. Considerar lineal el comportamiento del sistema magntico. Considerar una distribucin de los devanados en el estator idntica, formando una
fuerza magnetomotriz de forma sinusoidal.
AdministradorCross-Out
AdministradorInserted Text
AdministradorCross-Out
AdministradorInserted Text
AdministradorCross-Out
AdministradorInserted Text
AdministradorCross-Out
AdministradorCross-Out
AdministradorInserted Text
AdministradorCross-Out
AdministradorInserted Textc
AdministradorCross-Out
AdministradorInserted Textc
AdministradorCross-Out
AdministradorInserted Text
AdministradorInserted Texts
AdministradorCross-Out
AdministradorInserted Text
AdministradorCross-Out
AdministradorInserted Textc
-
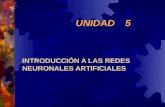
Fig. 2.1 Representacin simplificada de una mquina trifsica de dos polos [3].
Considerar la distribucin de barras o devanados en el rotor de tal manera que forman una fuerza magneto motriz con el mismo nmero de polos que el estator.
En este trabajo se toma como referencia el modelo propuesto por Krause [3] y el circuito
elctrico mostrado en la figura 2.1. El devanado del estator se representa mediante una
inductancia equivalente que expresa el acoplamiento mutuo entre rotor y estator en
funcin del desplazamiento angular entre los ejes magnticos de ambos devanados. En el
caso de los motores jaula de ardilla el devanado del rotor se puede considerar como un
conjunto de inductancias equivalentes formando un sistema de tres conductores [3-5].
Durante el desarrollo de las ecuaciones se considera como fuente de alimentacin un
sistema trifsico (a-b-c) sinusoidal con pulsacin 1 y valor mximo de voltaje V representado por las siguientes ecuaciones
)( 1tVsenva = Ec. 2.1
)32( 1 = tVsenvb Ec. 2.2 )34( 1 = tVsenvb Ec. 2.3
Del circuito elctrico mostrado en la figura 2.1 se tiene que el vector de voltaje de lnea a
neutro presente en el estator de un motor de induccin es [2, 3, 6]
ssabcsabcsabc ripv += Ec. 2.4
15
-
Donde:
sabcv Vector de voltaje aplicado a los devanados del estator en el marco de
referencia a-b-c.
sabcp Variacin respecto al tiempo de los enlaces de flujo magntico en el estator referenciados al marco a-b-c.
sabci Vector de corriente del estator en el marco de referencia a-b-c.
sr Resistencia equivalente del devanado de una fase del estator.
El vector de voltaje de lnea a neutro del rotor es
rrabcrabcrabc ripv += Ec. 2.5
Donde:
rabcv Vector de voltaje del rotor en el marco de referencia a-b-c.
rabcp Variacin respecto al tiempo de los enlaces de flujo magntico en el rotor, marco de referencia a-b-c.
rabci Vector de corriente del rotor, marco de referencia a-b-c.
rr Resistencia equivalente del devanado de una fase del rotor.
Y los enlaces de flujo estn dados por
Ec. 2.6
+++
+++
=
cr
br
ar
cs
bs
as
rrrsrrsrrsr
rrrsrrsrrsr
rrrsrrsrrsr
rsrrsrrsrss
rsrrsrrsrss
rsrrsrrsrss
cr
br
ar
cs
bs
as
iiiiii
LLLL
LLLL
LLLL
LLLL
LLLL
LLLL
00cos)3
2cos()3
2cos(
00)3
2cos(cos)3
2cos(
00)3
2cos()3
2cos(cos
cos)3
2cos()3
2cos(00
)3
2cos(cos)3
2cos(00
)3
2cos()3
2cos(cos00
En la ecuacin 2.6
smsss LLL = Ec. 2.7
16
-
rmrrr LLL = Ec. 2.8 Donde:
r Desplazamiento angular entre los ejes del estator y el rotor (ver fig. 2.1). srL Inductancia mutua entre los devanados del estator y rotor.
sL Inductancia propia del estator.
rL Inductancia propia del rotor.
smL Inductancia mutua entre las fases del estator.
rmL Inductancia mutua entre las fases del rotor.
2.2 Transformaciones de coordenadas y vectores espaciales Ya que la variacin de inductancias mutuas que involucran la ecuacin 2.6, es una
funcin sinusoidal del desplazamiento angular r , algunos de los coeficientes en las ecuaciones de voltaje (ecuacin 2.4 y ecuacin 2.5) son variantes en el tiempo. Para
eliminar esta condicin no deseada, se puede emplear un cambio de variables que
transforme los voltajes y corrientes del estator y del rotor a un marco de referencia comn
invariante en el tiempo, presentando una estructura similar al de un motor de corriente
directa.
Se presentan ventajas en trminos de simplicidad matemtica y claridad en el anlisis del
fenmeno fsico, el manipular las variables de la maquina en forma de vectores espaciales
representados en un marco de referencia conveniente, haciendo uso de la relacin
trigonomtrica que existe entre los sistemas de ejes a emplear [2-4, 7].
Si consideramos el sistema trifsico de voltajes representado por las ecuaciones 2.1 a 2.3,
en un determinado instante de tiempo, el devanado de cada una de las fases produce en el
entrehierro una distribucin sinusoidal de flujo electromagntico, creando un vector
espacial de la fuerza magnetomotriz resultante que gira a la misma frecuencia del voltaje
aplicado (Ec. 2.9) [4].
17
-
Eje b
Eje c
Eje aIa
Ib
Ic
F (t)a
F (t)c
F (t)b
Eje B
IF (t)a
F (t)cF (t)b
A
IB
F (t)s Eje A
Fig. 2.2 Interpretacin fsica del vector espacial de la Fuerza Magnetomotriz (FMM)[4].
)()()()( tFtFtFtF aca
ba
aa
s
++=
Ec. 2.9
Donde:
asF
Vector espacial de flujo electromagntico del estator referenciado al eje de la
fase a. a
cbaF ,, Vector instantneo de flujo electromagntico del estator de la fase a, b o c,
referenciados a la fase a.
Al considerar el sistema como trifsico balanceado, se puede definir una transformacin
sobre un sistema arbitrario de ejes 0-d-q empleando la siguiente matriz de transformacin
[7]
=
sc
sb
sa
sq
sd
s
FFF
sencsencsenc
ccc
ccc
FFF
)3
4()3
2(
)3
4cos()3
2cos(cos
222
222
1110
Ec. 2.10
dtd
k = Ec. 2.11
18
-
Fig. 2.3 Transformacin de una variable trifsica a un marco de referencia q-d.
En la ecuacin 2.11, k es la velocidad a la cual gira el conjunto de ejes 0-d-q respecto al eje estacionario a del sistema trifsico.
Realizando esta transformacin sobre un sistema de ejes estacionario A-B (Fig. 2.3b)
obtenemos la transformada de Clark
=
sc
sb
sa
sB
sA
s
FFF
ccccc
ccc
FFF
223
223
221
221
2
1110
0
Ec. 2.12
Podemos referir el vector espacial a un sistema de ejes d-q desfasado un ngulo)(tF s
respecto a A-B mediante la transformacin
sqsdj
ssk jFFeFF +== Ec. 2.13
Al fijar el valor para en las ecuaciones 2.10 y 2.12 se determina la manera en la que
se comportan las magnitudes de las seales manipuladas, de tal forma que se puede
mantener invariante la potencia en cualquiera de los marcos de referencia, o hacer que el
modulo del vector espacial coincida con el valor mximo de la seal transformada, esto
solo afecta los valores absolutos de las variables en las transformaciones, pero se
mantendrn las forma de onda [7].
21c
19
-
En este trabajo se consideran los valores de 211 =c y 12 =c , en este caso la potencia en la transformacin no se mantiene constante y el modulo del vector espacial ser 3/2 del
valor mximo de la seal trifsica. Esta transformacin puede aplicarse a cualquier
conjunto de magnitudes trifsicas [7].
2.2.1 Ecuaciones del motor en un sistema de ejes q-d Al observar el vector espacial de voltaje empleando un marco de referencia estacionario
(transformada de Clark 0=k ) este girara a una velocidad 1 , y ser de naturaleza sinusoidal. Este vector espacial de voltaje en el marco estacionario puede ser
transformado a un marco de referencia cuya velocidad de giro e (del Eje q en Figura 2.3) coincida con la del sistema , arrojando las siguientes expresiones [3-5, 8]
s
eqs
eds
eqs
eqs rippv ++= Ec. 2.14
seds
eqs
eds
eds rippv += Ec. 2.15
reqr
edr
eqr
eqr rippv ++= Ec. 2.16
redr
eqr
edr
edr rippv += Ec. 2.17
eqrsr
eqsss
eqs iLiL += Ec. 2.18
edrsr
edsss
eds iLiL += Ec. 2.19
eqssr
eqrrr
eqr iLiL += Ec. 2.20
edssr
edrrr
edr iLiL += Ec. 2.21
)(22
3 eqr
edr
edr
eqre ii
PT =
Ec. 2.22
Donde: El superndice e indica un marco de referencia sincrono con los ejes q-d.
edsqs
v,
Componentes del vector voltaje del estator en el marco de referencia q-d. e
dsqsp , Variacin respecto al tiempo de los enlaces de flujo magntico en el estator
20
-
referenciados a los ejes qd. e
dsqs , Enlaces de flujo magntico en el estator referenciados a los ejes qd. Desplazamiento angular entre los ejes de la fase a del estator y la fase A del
rotor. e
dsqsi , Componentes del vector de corriente del estator referenciados a los eje qd. e
drqrv , Componentes del vector de voltaje del rotor referenciados a los ejes qd. e
drqrp , Variacin respecto al tiempo de los enlaces de flujo magntico en el rotor referenciados a los ejes qd.
edrqr , Enlaces de flujo magntico en el rotor referenciados a los ejes qd.
Desplazamiento angular entre el eje de la fase A del rotor y el eje q. e
drqri , Componentes del vector de corriente del rotor referenciados a los ejes qd.
eT Par elctrico generado.
P Numero de polos de la mquina.
2.2.2 Ecuaciones del motor en coordenadas de flujo de rotor
Para la implementacin del control en campo orientado, existen algunos marcos de
referencia que permiten simplificar la expresin de las ecuaciones mediante la seleccin
adecuada de su velocidad de giro k [1, 2, 4, 7, 9, 10]. Existen tres posibles sistemas de ejes que permiten modelar de manera desacoplada las variables del motor de induccin,
respecto a cada uno de los flujos magnticos predominantes de la mquina (rotor, estator
y entrehierro). En la modelacin matemtica no existe mucha diferencia, sin embargo en
trminos de control, la respuesta dinmica del motor cambia mucho de un sistema a otro
[7] . Para el caso en el que se desea tener control sobre el par es necesario tener control
sobre parmetros elctricos en el rotor, por lo que es conveniente referenciar las
expresiones al campo magntico del rotor [7].
Si se escoge un marco de referencia tal que el flujo del rotor este alineado con el eje d y
la componente q del flujo sea cero, tenemos que
21
-
eqssr
eqrrr
eqr iLiL +== 0 Ec. 2.23
eqssr
eqrrr
eqr iLiL +== 0 Ec. 2.24
La ecuacin 2.24 presenta una gran similitud con la ecuacin de par del motor de
corriente directa. Para que se cumpla esta condicin de alineamiento, el deslizamiento
debe satisfacer:
edr
eqssr
rr
rre
iLLr
= Ec. 2.25
De donde
edssr
r
edr iLp
+= 11
Ec. 2.26
Y
r
rrr r
L= Ec. 2.27
2.3 Modelo Computacional del Motor de Induccin Teniendo las ecuaciones matemticas que describen el comportamiento dinmico de un
motor de induccin (Ecuaciones de la 2.14 a la 2.27), es posible implementar el sistema
empleando una plataforma de programacin de alto nivel, tal como el Matlab, para
simular el comportamiento de esta mquina en distintas condiciones de funcionamiento.
Cuando se desea analizar la respuesta de un motor especifico, se requieren determinar los
siguientes parmetros:
Resistencia elctrica del rotor . rr
22
-
Parmetros motor 3 HP Clase B Siemens Parmetro Valor
rr 0.3173 sr 0.8333 rrX 2.2357 ssX 1.4905 srX 35.9295
Tabla 2.1 Parmetros elctricos del motor de induccin trifsico utilizado.
Resistencia elctrica del estator . sr Inductancia del rotor . rrL Inductancia del estator . ssL Inductancia mutua . srL
En la literatura podemos encontrar una gran variedad de metodologas [11-18] y
herramientas [19-21] que permiten determinar estos parmetros. En este trabajo se toman
como base las pruebas recomendadas por el estndar IEEE-112 [22]: motor sin carga y
rotor bloqueado (Apndice A, Estimacin de Parmetros). La tabla 2.1 muestra los
parmetros del motor estimados de acuerdo a las pruebas realizadas.
El modelo computacional del motor se observa en las figuras 2.4 a 2.7. En la figura 2.4 se
muestra un modelo del motor de induccin en Simulink, ste se compone de tres
subsistemas: estimador de flujos, clculo de corrientes y clculo de velocidad mecnica y
transformacin de marco de referencia. El modelo requiere como parmetros de entrada
los voltajes de estator y el par de carga del motor.
Las figuras 2.5 a 2.7 muestran cada uno de los bloques empleados en los subsistemas del
modelo. La implementacin de cada uno de ellos se realiz tomando como base las
ecuaciones desarrolladas en este capitulo. Un anlisis ms detallado puede verse en los
artculos de Krauze [3] y Ozpineci [23].
23
-
3Tem
2wr
1iabcs
iqds
Tm
Te
iabcs
wr
Velocidad Mecanica yMarco de Referencia
iqdr
wr
v abcs
iqds
psiqr
psidr
psiqs
psids
1T_mec
psiqr
psidr
psiqs
psids
iqdr
iqds
Te
2Voltajes_abcs
Estima enlacesde Flujo Ejes q-d
CalculaCorrientes del estator
Fig. 2.4 Modelo en Matlab-Simulink de un motor de induccin trifsico.
Transforma marco de refereciaEcuacion 2.12
De ecuaciones 2.14 a 2.17
4psids
3psiqs
2psidr
1psiqr
1/wb
Rr1/wb
wb
Rs
1s
2*(u(1)-u(2)/2-u(3)/2)/3
(u(3)-u(2))/sqrt(3)
em
em
em4iqds
3vabcs
2
wr
1iqdr
psidr
psidr
psiqr
Rr*iqr
Rr*idr
psiqs
psidsv qs
v ds
Rs*iqs
Rs*ids
Fig. 2.5 Subsistema que estima los enlaces de flujo en el marco de referencia q-d.
Despejando de Ecuaciones 2.18 a 2.21
Calcula Par ElectricoEcuacion 2.22
3Te
2iqds
1iqdr
1/Xls
1/XlrXaq*(u(1)/Xlr+u(2)/Xls)
Xad*(u(1)/Xlr+u(2)/Xls)
3*P*(u(4)*u(1)-u(3)*u(2))/(4*wb)
4psids
3psiqs
2psidr
1psiqr
psimq
psimd
Fig. 2.6 Subsistema que calcula las corrientes del estator en el marco de referencia q-d.
24
-
Considerando ecuaciones 2.24 y 2.25
Transforma marco de refereciaInversa de ecuacion 2.12
2
wr
1iabcs
wbP/(2*J*wb) 1s
-u(1)/2+sqrt(3)*u(2)/2
-u(1)/2-sqrt(3)*u(2)/2
u(1)
3Te
2
Tm
1iqds
Fig. 2.7 Subsistema que calcula la velocidad mecnica y transforma a un marco de referencia estacionario.
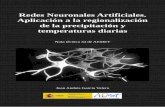
Fig. 2.8 Curva Par-Velocidad en aceleracin libre del motor de 3HP utilizado
(simulacin).
Empleando los parmetros de la Tabla 2.1, en las Figuras 2.8 y 2.9 se muestra la
respuesta dinmica del motor simulado, con los parmetros arrojados por las pruebas de
rotor bloqueado y aceleracin libre. Alimentado con una fuente sinusoidal ideal a voltaje
nominal. De dichas figuras se puede ver que la respuesta se asemeja al comportamiento
de una mquina de bajo deslizamiento y alta inercia [9].
25
-
0 1000 2000 3000 4000 5000 6000 7000 8000 9000 10000-50
0
50
100
150
200
250
300
350
400
Wm
r (ra
d/s)
y T
e (N
*m)
0 1000 2000 3000 4000 5000 6000 7000 8000 9000 10000-80
-60
-40
-20
0
20
40
60
80
100
I-abc
-s (A
)
0 1000 2000 3000 4000 5000 6000 7000 8000 9000 10000-80
-60
-40
-20
0
20
40
60
tiempo (s/10000)
I-qd-
r (A
)
Fig. 2.9 Respuesta dinmica del Motor en aceleracin libre. Parmetros Estimados
Como se menciono anteriormente, el control vectorial (orientado con el flujo de rotor) es
muy sensible a variaciones en la resistencia del rotor . En las figuras 2.10 y 2.11 se
muestra la respuesta del motor con una modificacin en el valor estimado de , este es
multiplicado por
rr
rr
3 . Como se observa en dichas figuras, la respuesta dinmica del
modelo se modifica de manera considerable. Las corrientes de estator se estabilizan en un
tiempo menor, la curva Par-Velocidad en aceleracin libre es mas estable, y la respuesta
es similar a la de un motor de alto deslizamiento [9], como es el caso del motor
considerado en este trabajo (Apndice A).
En este trabajo se tomara el valor modificado de la resistencia del rotor en las
simulaciones que se desarrollen, ya que es el que mejor representa la respuesta real de la
mquina utilizada en la experimentacin.
26
-
Fig. 2.10 Curva Par-Velocidad en aceleracin libre de un motor 3HP con estrr rr = 3
0 1000 2000 3000 4000 5000 6000 7000 8000 9000 10000-50
0
50
100
150
200
250
300
350
400
Wm
r (ra
d/s)
y T
e (N
*m)
0 1000 2000 3000 4000 5000 6000 7000 8000 9000 10000-80
-60
-40
-20
0
20
40
60
80
I-abc
-s
0 1000 2000 3000 4000 5000 6000 7000 8000 9000 10000-80
-60
-40
-20
0
20
40
60
Tiempo (s /10 000)
I-qd-
r
Fig. 2.11 Respuesta dinmica del Motor en Aceleracin libre. Con estrr rr = 3
27
-
Referencias Bibliogrficas
1. Trzynadlowski, A.M., The Field Orientation Principle in Control of Induction
Motors. 1994, Nevada, Reno: Kluwer Academic Publishers. 2. Novotny, D.W. and L.T. A., Vector Control and Dynamics of AC Drives.
Monographs in Electrical and Electronic Engineering. 2000: CLARENDON PRESS - OXFORD.
3. Krause, P.C. and C.H. Thomas, Simulation of Symmetrical Induction Machinery. IEEE Transactions on Power Apparatus and Systems, 1965. 11.
4. Mohan, N., Advanced Electric Drives Analysis, Control and Modeling using Simulink. 2001: MNPERE.
5. Vas, P., Parameter Estimation, Condition Monitoring, and Diagnosis of Electrical Machines. Monographs in Electrical and Electronic Engineering. 2001: Oxford University Press.
6. Boldea, I. and N.S. A., ELECTRIC DRIVES. 1999: CRC Press LLC. 7. Briz del Blanco, F., Control Vectorial del Motor de Induccion con Identificacion
y Adaptacion a los Parametros de la Carga, in Dep. Ing. Electrica, Electronica, de Computadores y Sistemas. 1995, Universidad de Oviedo: Oviedo.
8. Novotny, D.W. and a. others, Field Orientation and High Performance Motion Control. Summary of Publications. 1988, Wisconsin: WEMPEC.
9. Krause, P.C., O. Wasynczuk, and S.D. Sudhoff, Analysis of Electric Machinery and Drive Systems. Second ed. IEEE Press Series on Power Engineering, ed. M.E. El-Hawary. 2002: IEEEPress,Wiley-Interscience.
10. Vargas Salas, R. and M.M.G. Muoz, Control Escalar y Vectorial de las maquinas de induccion, in Division de Estudios de Posgrado e Investigacion. 2002, Instituto Tecnologico de la Laguna: Coahuila, MX.
11. Trentin, A., et al., A New Method for Induction Motors Parameter Estimation Using Genetic Algorithms and Transient Speed Measurements. IEEE Conference Records 2006, 2006. 5: p. 2435-2440.
12. Phumiphak, T. and C. Chat-uthai, Estimation of Induction Motor Parameters Based on Field Test Coupled with Genetic Algorithm. IEEE Proceedings Power System Technology, 2002. 2(2): p. 1199-1203.
13. Kerkman, R.J., J.D. Thunes, and T.M. Rowan, A Frequency Based Determination of the Transient Inductance and Rotor Resistance for Field Commissioning Purposes. IEEE Industry Applications Conference Records 1995, 1995. 1: p. 359-366.
14. Telford, D., M.W. Dunnigan, and B.W. Williams, Online Identification of Induction Machine Electrical Parameters for Vector Control Loop Tuning. IEEE Transactions on Industrial Electronics, 2003. 50(2): p. 253-261.
15. Donescu, V., A. Charette, and Z. Jao, A New Automated Method for Estimation of Induction Motor Parameters. IEEE Conference Records 1998, 1998. 1: p. 381-384.
16. Stokcs, M. and A. Medvedev, Estimation of Induction Machine Parameters at Start-up Using Current Envelope. IEEE Conference Records 2002, 2002. 2: p. 1163-1170.
28
-
17. Grantham, C. and D. McKinnon, Rapid Parameter Determination for Induction Motor Analysis and Control. IEEE Transactions on Industrial Applications, 2003. 39(4): p. 1014-1020.
18. Zhou, X. and H. Cheng, The Induction Motor Parameter estimation through an adaptive Genetic Algorithm. IEEE Conference Records 2004, 2004. 1: p. 494-498.
19. Roy, P.V., B. Renier, and K. Hameyer, A practical Set-up for a Standard Test Procedure on Polyphase Induction Motors. IEEE Conference Records 1997, 1997. 1: p. 207-214.
20. Chiasson, J., K. Wang, and M. Bodson, An Online Rotor Time Constant Estimator for the Induction Machine. IEEE Transactions on Control Systems Technology, 2007. 15(2): p. 339-348.
21. Cirrincione, M., M. Pucci, and G. Cirrincione, A New Experimental Application of Least-Squares Techniques for the Estimation of the Induction Motor Parameters. IEEE Transactions on Industrial Applications, 2003. 39(5): p. 1247-1256.
22. IEEE, IEEE-112 Standard Test Procedure for Polyphase Induction Motor and Generators. IEEE Power Engineering Society, 1991. 1.
23. Ozpineci, B. and L.M. Tolbert, Simulink Implementation of Induction Machine Model - A Modular Approach IEEE IEMDC'03, 2003. 2: p. 728-734.
29
-
CAPTULO III
Control Vectorial del Motor de Induccin En este capitulo se presenta la simulacin del Control Vectorial de un motor de induccin
tipo jaula de ardilla orientado con el Flujo de Rotor (OFR). En primer lugar se presentan
las ecuaciones para desarrollar el modelo de flujo del motor. Posteriormente, y debido a
su importancia en el control vectorial, se hace una resea de la Fuente Inversora
alimentada por Voltaje (VSI, por sus siglas en ingles) y de la tcnica de modulacin
PWM con vectores espaciales (SV-PWM) [1, 2].
Por ltimo se presentan una serie de simulaciones donde muestran la respuesta del motor
de induccin gobernado por el control OFR.
3.1 Control Vectorial Orientado con el Flujo de Rotor (CV-OFR) Los accionamientos de motores de induccin de altas prestaciones dinmicas requieren
un control preciso e independiente (desacoplado) tanto del par como del flujo. La
mayora de los esquemas modernos se basan en el mtodo de control vectorial o campo
orientado, conocida as por el control que se hace de las corrientes y voltajes en forma
vectorial para orientar espacialmente los campos electromagnticos del motor de
induccin [3]. El control vectorial intenta controlar el motor de induccin como un motor
de corriente continua de excitacin separada. La clave para conseguirlo se encuentra en
determinar de manera correcta la posicin del flujo del rotor, el cual se puede medir
(modo directo) o estimar (modo indirecto). El control vectorial mediante la orientacin
del flujo de rotor basa su funcionamiento en los puntos siguientes:
AdministradorCross-Out
AdministradorInserted Text
AdministradorCross-Out
AdministradorInserted Text
-
Figura 3.1Tecnicas de control para maquinas de corriente alterna [4].
Uso de un modelo de flujo del motor expresado mediante vectores espaciales. Orientacin del flujo de rotor en un marco de referencia que permita observar en
estado estacionario las corrientes de rotor en forma desacoplada y no variantes en
el tiempo. Considera estimable la posicin del vector de flujo de rotor.
Etapa reguladora, en base a los resultados arrojados por el Orientador de flujo genera Voltajes de alimentacin consigna. Normalmente emplea elementos
reguladores Proporcional-integral.
Dentro de las tcnicas de control para motores de induccin no solo existe la de control
vectorial por flujo orientado, existen otras que han sido agrupadas en el bosquejo de la
figura 3.1.
31
-
Fig. 3.2 Diagrama de bloques, Control Vectorial de un Motor de Induccin [5].
3.1.1 Sistema Orientador de Flujo [1] La figura 3.2 muestra un diagrama de bloques general para la implementacin fsica de
un Control Vectorial. Una de las premisas en que se basa el CV-OFR es en la similitud
del modelo q-d del motor de induccin con el modelo matemtico del Motor de CC [1, 3,
6-8]
afare icikT == Ec. 3.1
Donde:
ai Corriente de armadura.
f enlace de flujo de excitacin en el motor de CC.
Despus de algunas manipulaciones en las ecuaciones que modelan la mquina de
induccin y auxiliado de vectores espaciales, la corriente del estator se puede
descomponer en una componente proporcional al flujo ( ) y en otra componente
proporcional al par ( ), por lo que el flujo de magnetizacin puede ser directamente
dsi
qsi
32
-
controlado por la proyeccin en el eje d de la corriente del estator de acuerdo a la
ecuacin 2.26.
edssr
r
edr iLp
+= 11
Si consideramos un vector de enlaces de flujo del rotor orientado en el sistema de ejes q-d
(girando a velocidad k , seccin 2.3.1), siendo su componente q igual a cero, tenemos que
ekssr
ekrr
edr
ekr iLiL +== Ec. 3.2
De ecuaciones 2.16 y 2.17
rekr
ekr
ekr
ekr rippv += Ec. 3.3
Si se define una corriente denominada corriente magnetizante del rotor, de forma que
esta sea la nica responsable del flujo del rotor, tendremos [1]
emRi
ekr
sr
reks
emR iL
Lii += Ec. 3.4
Sustituyendo en la ecuacin 3.2, se puede expresar el flujo del rotor en trminos de la
corriente
eksi
mRi
emRsr
edr
ekr iL == Ec. 3.5
Expresando el Par (ecuacin 2.24), en trminos de tenemos que emRi
eqs
emRTe iiPCT = Ec. 3.6
Siendo la constante de par, ecuacin 3.7. TC
33
-
)1(32
r
srT
LC += Ec. 3.7
y r el coeficiente de dispersin de rotor (coeficiente de Blonde)
rs
sr
sr
srrr LL
LL
LL 2)(1== Ec. 3.8
Si se trabaja con una corriente de campo constante el flujo ser constante, y entonces el
par se controlara solo por la componente q de la corriente del estator (ecuacin 3.6).
Esta es una peculiaridad en este sistema de referencia ya que en los otros dos sistemas
(estator y entrehierro) el flujo del rotor depende de las dos componentes q-d del vector
espacial de corriente del estator.
eqsi
Al modelo del motor que se obtiene cuando se elige el eje d coincidente con el flujo de
rotor se le denomina modelo de flujo en campo orientado, en este caso las ecuaciones de
voltaje en el estator pueden ser deducidas considerando la definicin de [1] mRi
dtdii
Rui
dtdi mR
srqsmRsrs
dsds
dssr +=+ )1( Ec. 3.9
mRmRsrdsmRsrs
qsqs
qssr iiR
ui
dtdi =+ )1( Ec. 3.10
3.1.2 Observador de Flujo [1] La realimentacin de la posicin del flujo de rotor, necesaria en el CV-OFR, es
determinante en la orientacin del sistema de referencia y por ende en su actuacin. Con
el fin de suprimir el uso de los sensores de flujo se han propuesto diferentes soluciones,
stas se pueden separar en dos grupos:
34
-
Las basadas en Observadores, entendiendo como tales aquellos sistemas que incluyen
algn tipo de realimentacin para mejorar la precisin o la rapidez en la estimacin, y que
pueden denominarse Observadores de Cadena Cerrada
Los basados en estimadores, tambin denominados Observadores en Lazo Abierto, y que
no van a incluir ningn tipo de realimentacin.
Existe una gran variedad de Observadores de flujo para el motor de induccin que
difieren principalmente por las variables de estado que emplean (Modelo de Corriente,
Modelo de Voltaje, Mixto, etc.) y su arquitectura (de lazo abierto o de lazo cerrado) [3, 7,
9, 10]. En este trabajo se emplea el utilizado por Briz del Blanco en su tesis doctoral [1].
Dicho modelo considera el uso de como seal meditica en el control del flujo de
magnetizacin del rotor y emplea como seales de entrada las corrientes del estator y la
velocidad mecnica del rotor.
emRi
Ya que la corriente se encuentra definida en funcin de parmetros que involucran
corrientes del rotor (ecuacin 3.4) y estas no son accesibles en el motor de induccin, es
conveniente expresarla en trminos de corrientes del estator.
emRi
Al orientar el marco de referencia con el flujo del rotor se considera que todo el flujo del
rotor se encuentra en el eje d, de la ecuacin 2.23 se obtiene la relacin entre la corriente
del rotor y la corriente , que es la que comanda el par, eqrieqsi
eqs
r
sreqr iL
Li ='
Ec. 3.11
Con siendo cero, es cero, por lo tanto la ecuacin de voltaje del eje q del rotor
(ecuacin 2.16), se convierte en:
eqr eqrp
edrre
eqrr
eqr irv +== )(0 Ec. 3.12
35
-
Ecuacion 3.14
DespejandoEcuacion 3.16
Ecuacion 3.15
ImR
Is_q
Ecuacion 2.10 y 2.12Transforma marco de referencia
4Rho
3ImR
2Isqe
1Isde
1
Tr.s+1
1s
0.0001
ImR_remanente
Tr
iabcs
rho
Is_d
Is_q
2wr
1Is_abc
Fig. 3.3 Observador de Flujo implementado en Simulink para el CV-OFR.
De la ecuacin 3.3 tenemos
rekr
emRk
emRsr
ekr riijpiLv ++== )(0 Ec. 3.13
Donde:
emRpi
Variacin respecto al tiempo de la corriente magnetizante del rotor.
En otras palabras, el deslizamiento debe satisfacer [1, 3, 7, 8]
mRr
qsedr
eqrr
edr
eqssr
r
rere i
iiriLLrS =
=== Ec. 3.14
Haciendo uso de las ecuaciones 3.4, 3.5 y 3.13 se puede expresar en trminos de edsi mRi
mRmRreds ipii += Ec. 3.15
De acuerdo a la ecuacin 3.14 la alineacin del eje d con el campo del rotor se puede
mantener en todo momento conservando dicha velocidad de deslizamiento, y la magnitud
del flujo en el rotor , se puede ajustar controlando . edr mRi
36
-
De ecuacin 2.26 podemos obtener una expresin que represente la dinmica del flujo del
rotor
edssr
edr
r iLp
=+1/1 Ec. 3.16
En caso de conocer las corrientes del estator y la velocidad del rotor, las ecuaciones 3.14,
3.15 y 3.16 permiten implementar dicho Modelo de flujo mediante un Observador en lazo
abierto, mostrado en figura 3.3.
Algunas condiciones presentes al emplear este modelo son [1, 7]:
Contenido bajo de armnicos en las seales de corriente, comparadas con las de voltaje.
Su velocidad de convergencia (con parmetros estimados adecuadamente) es controlada por la constante de tiempo del rotor (ecuacin 2.27).
Los errores en la estimacin de dicha constante afectan de forma importante la precisin de la estimacin del flujo y por ende el desempeo del controlador.
Con deslizamientos elevados, el flujo estimado va a ser muy sensible en magnitud a la resistencia de rotor . rr
Con valores de deslizamiento bajos, el parmetro que mas afecta a la magnitud va a ser . srL
Hay un problema especial en motores con ranuras cerradas en el rotor, ya que la inductancia de dispersin del rotor depende fuertemente de la corriente del
rotor cuando sta tiene valores bajos. El error que resulta en el ngulo del flujo
puede ser grande si no se emplea alguna forma de adaptacin.
lrL
Aunque existen otros modelos para la estimacin del flujo, no van a existir, desde el
punto de vista de la sensibilidad ante errores en los parmetros, grandes diferencias con el
aqu presentado [1].
37
-
4ImR
3Rho
2Isqe
1Isde 0.0001
ImRRemanente
(inicial)
Tr
F2812 eZdsp
Tmue.z
z-1
Tmue.z
(Tr+Tmue)z-Tr
double
double
Convert
Convert
double
double
Ia
Ib
rho
Ds
Qs
Convierte marco de referencia
3wr
2Ib
1Ia
Fig. 3.4 Observador de Flujo Discreto implementado en Simulink para el CV-OFR.
En la figura 3.4 se muestra el observador de flujo en forma discreta. Para la conversin al
espacio discreto se emplea la transformada z de Fourier
mueTzs
11 = Ec. 3.17
Dicho observador en simulaciones bajo condiciones normales de operacin a 10 KHz
estima de manera aceptable la respuesta del motor en el espacio discreto.
3.1.3 Esquema de control [1] El esquema de control depende del funcionamiento del inversor, ya sea si este funciona
como fuente de voltaje o como fuente de corriente. En cualquiera de los casos, la filosofa
de control es la misma. Se dispone de dos ramas independientes, una para el flujo y otra
para el par, siendo reguladas por separado. Para nuestro caso en el sistema de control se
emplea una fuente inversora alimentada por voltaje, por lo que solo se considerara el
esquema de control para dicho dispositivo, como se muestra en la figura 3.5.
38
-
Fig. 3.5 Control de campo orientado alimentado en voltaje [1].
En la implementacin del CV-OFR, el modelo de flujo desarrollado en la seccin anterior
se complementa con la estructura general del control que muestra la figura 3.5. Los
bloques representados en dicha figura son:
: Reguladores de velocidad, flujo, par y voltaje. Normalmente son del tipo Proporcional-integrador (PI).
qsdsqsdsE uuiiTRRRRR ,,,,
DF : Bloque de Debilitamiento de campo (Field Weakening). Es el encargado de generar la referencia de flujo en funcin de la velocidad. Emplea una ley de
debilitamiento, ejemplo, /1 . PWM: Fuente Inversora alimentada por Voltaje. En este trabajo se asume
funcionar con modulacin por ancho de pulso.
, : Corresponde a la transformacin inversa de coordenadas de campo a coordenadas de estator y al paso de vector espacial de corrientes de estator al
sistema trifsico.
je 32
Compensa: Bloque de compensacin. Su misin es mantener el desacoplo en el control al obtener los voltajes de referencia.
De figura 3.5, en la rama de par (superior) el error de velocidad va a generar, a travs del
regulador correspondiente, la referencia de par , la cual se compara con el par motor *eT
39
-
efectivo , que ha sido estimado por el modelo de flujo, para proporcionar la corriente
de par necesaria . Esta, a su vez, va a ser comparada con la corriente estimada y su
error regulara el voltaje referencia . El funcionamiento de la rama de flujo es idntico,
solo que ahora la referencia es generada por el bloque DF su error respecto a es
estimado y su regulacin proporciona la componente .
eT
*qsi qsi
*qsv
*mRi mRi
*dsi
De las ecuaciones de tensiones en el estator (ecuaciones 3.9 y 3.10) se deduce que el
desacoplo existente en las corrientes en coordenadas de campo se pierde al pasar a
tensiones. Es decir, las variaciones en van a afectar a y las variaciones en van
a afectar a . La finalidad del bloque de compensacin es mantener este desacoplo,
compensando los trminos cruzados de las ecuaciones de tensin, que para la rama de
flujo son
dsu qsi qsu
dsi
eqsmRs
emR
s idtdi + )1( Ec. 3.18
Y para la rama de par
edsmRs
emRmRs ii )1( Ec. 3.19
3.2 Control de velocidad En la figura 3.6 se muestra la estructura del CV-OFR dispuesto en tal forma que
considera el control de una velocidad consigna. En dicho esquema el observador de flujo
estima las variables de estado requeridas en su etapa reguladora.
La estructura del control corresponde al esquema de control del motor alimentado en
tensin, figura 3.5, pero sin bloque de compensacin y con su etapa reguladora de Par
modificada.
40
-
Fig. 3.6 Control Vectorial Orientado con el Flujo del Rotor, empleando Observador de
Flujo [1].
La finalidad del bloque de compensacin es recuperar el desacoplo existente en el vector
espacial de corrientes de estator, el cual no se mantiene en el de tensiones. Sin embargo,
cuando la frecuencia de conmutacin es suficientemente grande, menor a 1 ms, los
reguladores de corriente van a ser en general lo suficientemente rpidos como para
compensar el acoplamiento entre las ramas de flujo y par. Bajo estas circunstancias, los
trminos dependientes de y sus derivadas van a ser filtrados por la constante de
tiempo en el rotor, por lo que sus variaciones van a ser lentas y fcilmente compensables
por los reguladores. Los trminos dependientes de son los que van a presentar
variaciones mas rpidas y los reguladores mantienen perfectamente el desacoplo, por lo
que no es necesario utilizar ningn tipo de compensacin.
mRi
qsi
Los objetivos habituales en un sistema de regulacin de velocidad son, por una parte
mantener constante la velocidad de funcionamiento del motor ante variaciones de la
carga, cumpliendo ciertos requisitos de respuesta. En ciertos casos, es conveniente
mantener el flujo constante, siempre que sea posible, en su valor nominal, puesto que su
dinmica esta controlada por la constante del rotor r , la cual toma valores relativamente elevados. Asumiendo una correcta sintonizacin del modelo del motor y por tanto un
desacoplo efectivo entre las ramas de flujo y de par, el control de la velocidad se va a
realizar, mientras no se entre en la regin de debilitamiento de campo, nicamente a
travs de la corriente de par . qsi
41
-
Fig. 3.7 Estructura de la etapa de potencia en la Fuente VSI.
3.3 Fuente Inversora alimentada por Voltaje Como se menciono anteriormente, el CV-OFR determina los voltajes del estator en sus
componentes q-d. Las Fuentes Inversoras alimentadas por Voltaje (VSI) accionadas
mediante la tcnica de modulacin por ancho de pulso (PWM, por sus siglas en ingles),
son las ms empleadas para la generacin de los voltajes arrojados por el cont